Your cart is currently empty!
مدلسازی مکانیزم چهارلینکی در آدامز

در میان انواع مکانیزمها و اهرمبندیهای مختلف در دینامیک ماشین، رایجترین و ویژهترین نوع، مکانیزم چهارلینکی یا چهارمیلهای است. بسیاری از مکانیزمهای متداول در دستگاههای مکانیکی را میتوان با ترکیبی از مکانیزمهای چهار میلهای شناسایی کرد. در این مطلب توضیحاتی راجعبه این مکانیزمها ارائه میشود و در ادامه آن نیز آموزش نحوه مدلسازی یک مکانیزم چهار میلهای چرخشی- نوسانی در نرمافزار Adams ارائه میشود.
انواع مکانیزمهای چهار لینکی
یک مکانیزم ۴ لینکی در حالت کلی میتواند به صورتهای مختلف چرخشی- نوسانی (Crank- Rocker)، نوسانی- نوسانی (Double Rocker) و یا چرخشی- چرخشی (Double Crank) حرکت کند. در این مطلب درباره با حالت چرخشی- نوسانی بحث و آموزش نحوه مدلسازی آن در نرمافزار Adams ارائه خواهد شد.
مکانیزم چهارلینکی چرخشی- نوسانی
در این مکانیزم، با حرکت دورانی لینک ۲ (شکل ۱)، لینک ۴ به صورت دورانی حرکت نوسانی خواهد داشت. برای مدلسازی این مکانیزم، در ابتدا لازم است تا با اصول اولیه حاکم بر ساختار این مکانیزمها آشنا شویم. در طراحی این مکانیزمها باید شرایط هندسی خاصی برآورده شود تا بتوان لینکها را به شکل گفتهشده به حرکت درآورد.
مدلسازی مکانیزم چهارلینکی در آدامز برای مکانیزم ۴ لینکیِ چرخشی-نوسانی با نمادهای شکل ۱ انجام خواهد شد:
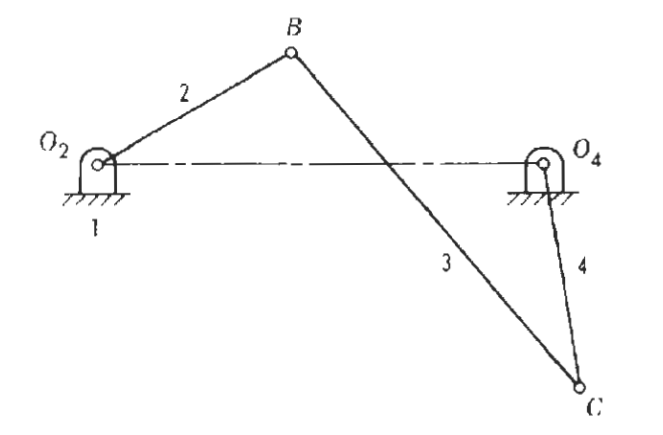
لینک ۲ در شکل ۱، به طور کامل حول لولای O۲ دورانی و لینک ۴ توسط لینک (رابط) ۳، حول O۴ نوسان میکند. این حرکت لینکها هنگامی کار میکند که شرایط زیر برقرار باشد:
\begin{aligned}
O_2B + BC + O_4C\ \rangle\ (O_2O_4)
\\
O_2B + O_2O_4 + O_4C\ \rangle\ (BC)
\\
O_2B + BC - O_4C\ \langle\ (O_2O_4)
\\
BC - O_2B + O_4C\ \rangle\ (O_2O_4)
\end{aligned}نامساویهای بالا براساس اصول هندسی، امکان ایجاد حرکت چرخشی- نوسانی را در مکانیزم ۴ میلهای بیان میکنند. بنابراین هر مکانیزم چهار لینکی باید شرایط هندسی مربوطه را داشته باشد تا بتوان طبق مدل مورد انتظار به حرکت درآید.
مدلسازی مکانیزم چهارلینکی در نرمافزار Adams
تعریف نقاط یا Point
برای شروع مدلسازی، بعد از تعریف یک پروژه جدید به صورت MMKS که در ” شروع کار با Adams” به آن اشاره کردیم، وارد محیط view شوید. در این مدلسازی باید ۴ نقطه O۲، B، C، و O۴ را برای ایجاد لینکها مشخص کرد، مختصات این چهار نقطه میتواند به صورت زیر باشد:
\begin{aligned}
O_2 = (-500,0,0) \\
B = (-500,300,0) \\
C = (470,420,0) \\
O_4 = (500,0,0)
\end{aligned}- نکته: مقادیر بالا باید به درستی تعریف شوند تا روابط بخش قبل برقرار باشند. در غیر اینصورت در طول شبیهسازی حرکت مکانیزم در نرمافزار Adams، برنامه با خطا مواجه خواهد شد و یا اینکه لینکها به صورتهای دیگری حرکت خواهد داشت.
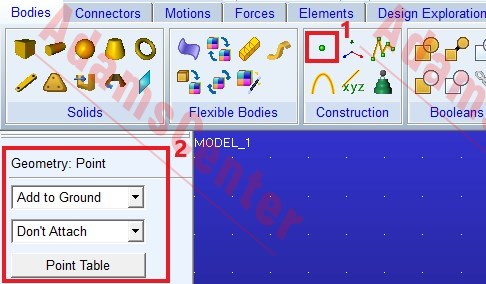
برای ایجاد نقاط در محیط view نرمافزار آدامز باید از ابزارهای بخش Construction در زبانه Bodies استفاده کرد. مطابق شکل ۲، بر روی آیکون مربوط به ایجاد نقطه ( Construction Geometry: Point) کلیک کنید (۱). بخش تنظیمات مربوطه در بالای منوی درختی ظاهر میشود (۲)، دو گزینه مربوطه را مانند شکل تنظیم کنید:
نشانگر موس را به محیط کاری (Working Grid) نرمافزار ببرید تا در بخش نوار فرمان (در گوشه پایین سمت چپ نرمافزار) پیغام Point: Select the point location ظاهر شود، سپس موقعیت موردنظر برای ایجاد نقطه یا Point اول را مشخص کنید. برای اینکار نشانگر را به مختصات ایجاد نقطه O۲ ببرید ( برای نمایش در لحظه مختصات نشانگر کلید F4 را فشار دهید)، وقتی مختصات موردنظر در کنار موس نمایش داده شد با یکبار کلیک موس، نقطه O۲ را ایجاد کنید.
همین کار را میتوانید برای ایجاد سه نقطه دیگر نیز انجام دهید، اما در صورتی که در مختصات یابی دقیق برخی نقاط (مثل نقطه C) نشانگر موس در موقعیت درست قرار نگرفت میتوانید با راست کلیک در هر جای صفحه کاری پنجره تعریف مختصات ( LocationEvent ) را فراخوانی کنید و در این پنجره به صورت دستی مختصات مورد نظر را تنظیم و Apply کنید.
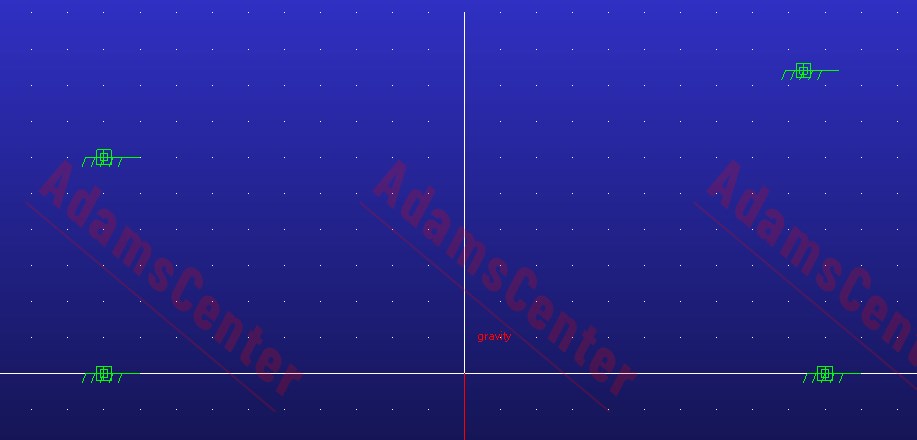
با تعریف نقاط فوق نمای شکل ۳ را خواهیم داشت:
در مطلب معرفی محیط Adams/view درباره کلیدهای میانبر بخوانید.
تغییر نام نقاط
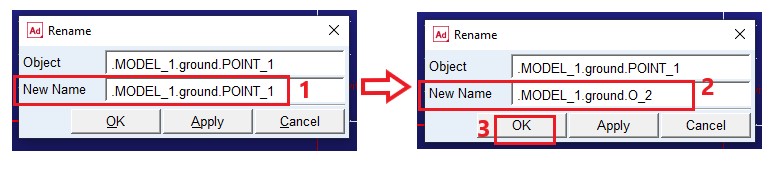
در منوی درختی مرورگر ( Browse) به زیر مجموعه Bodies و بعد زیر مجموعه ground بروید تا نام چهار نقطه جدید که به صورت POINT_1 تا ۴ شماره گذاری شدهاند ظاهر شود. برای تغییر نام اولین نقطه، روی POINT_1 راست کلید و گزینه Rename را انتخاب کنید تا پنجره Rename باز شود، نام O_2 را برای آن تنظیم کنید (شکل ۴).
نام سایر نقاط را نیز به همین صورت به B ، C و O_4 تغییر دهید.
ایجاد لینک ها در Adams
اکنون، اولین لینک از مکانیزم چهارلینکی موردنظر، یعنی لینک یا میله O۲C باید ایجاد شود. در بخش Solids در زبانه Bodies بر روی آیکون ایجاد لینک یا RigidBody: Link کلیک کنید تا تنظیمات Geometry آن در بالای منوی درختی ظاهر شود. New Part را برای منوی اول، تنظیم و تیک دو پارامتر عمق و عرض ( Depth و Width ) را فعال و مقدار آنها را به ترتیب ۲cm و ۳cm تنظیم میکنیم. سپس بر روی نقطه O۲ کلیک و انتهای لینک را نیز در نقطه B تنظیم میکنیم. بدین صورت اولین لینک ایجاد خواهد شد. لینک بعدی را بدین صورت که ابتدای آن نقطه B (انتهای لینک اول) و انتهای آن نقطه C باشد، ایجاد میکنیم. در نهایت آخرین لینک را نیز به همین شکل و براساس شکل ۱ ایجاد میکنیم تا در نهایت مدل شکل ۵ را در Adams/view داشته باشیم:
همانطور که در زیرمجموعه Bodies در منوی درختی کنار محیط کاری مشخص است، نرمافزار نام بخشهای جدید را به صورت PART_2، PART_3 و PART_4 تنظیم کرده است. ما به ترتیب ایجاد هر لینک، نام آنها را به Link_2، Link_3 و Link_4 تغییر میدهیم تا نامها همانند صورت مسئله در شکل ۱ شوند.
- نکته: لینک ۱ باید زمین باشد که در اینجا به صورت پیشفرض در منوی درختی با نام ground مشخص است.
بررسی طول لینکها
همانطور که در بخش اول این آموزش اشاره شد، باید روابط مربوط به حرکت چرخشی- نوسانی در مکانیزم حاکم باشد تا این مکانیزم چهار لینکی به درستی حرکت کند. بنابراین طول هر کدام از لینکهای ایجاد شده، برای صحتسنجی رابطه مکانیزم چرخشی- نوسانی، باید مشخص شوند.
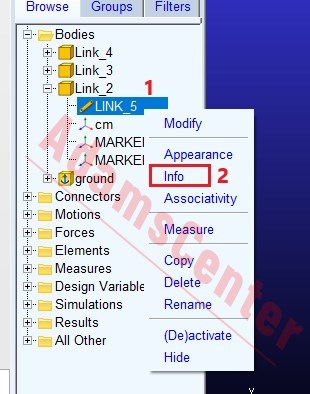
برای اینکه متوجه شوید طول لینک شماره ۲ چه مقدار است؟ زیر مجموعه نام آن در منوی درختی مرورگر را باز، سپس بر روی بخش هندسی آن که احتمالا با نام LINK_5 مشخص است، راست کلیک و گزینه info را انتخاب کنید. با اینکار پنجره information باز میشود (شکل ۶).
اطلاعات مختلفی از مدل هندسی قطعه در پنجره information قرار دارد. که برای Link_2 به صورت شکل ۷ خواهد بود:
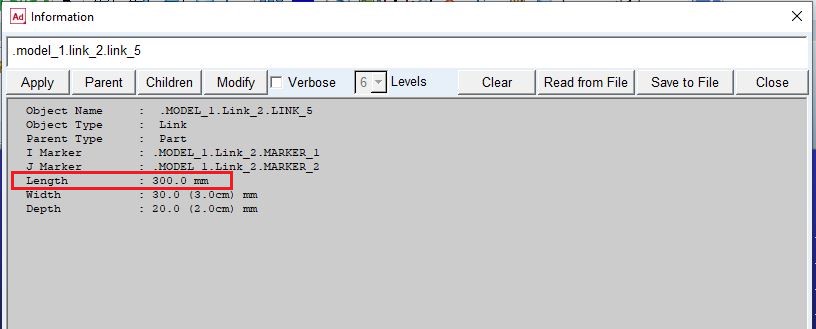
طول لینک موردی است که در این بخش لازم داریم تا درباره آن بدانیم، این مورد در قسمت Length مشخص است. برای LINK_2 این مقدار برابر با ۳۰۰mm است. برای لینکهای سوم و چهارم نیز به همین نحو طول آنها را مشخص میکنیم و فاصله دو مرکز دوران O۲ و O۴ نیز براساس موقعیتی که برای آنها تعریف کردیم برابر ۱۰۰۰mm است (فاصله مختصات _2O=(0,0,-500) تا _4O=(0,0,500)). درنهایت اندازههای زیر را برای این مکانیزم چهارمیلهای خواهیم داشت:
\begin{aligned}
O_2B = 300mm,\ BC = 977mm,\ O_4C = 421mm,\ O_2O_4 = 1000mm
\end{aligned}
صحتسنجی طول لینکها
بر اساس رابطه مکانیزم چهار لینکی چرخشی- نوسانی و طول هر لینک، داریم:
\begin{aligned}
O_2B + BC + O_4C\ \rangle\ (O_2O_4) \rightarrow 300+977+421\ \rangle\ 1000
\\
O_2B + O_2O_4 + O_4C\ \rangle\ (BC) \rightarrow 300+1000+421\ \rangle\ 977
\\
O_2B + BC - O_4C\ \langle\ (O_2O_4) \rightarrow 300+977-421\ \langle\ 1000
\\
BC - O_2B + O_4C\ \rangle\ (O_2O_4) \rightarrow 977-300+421\ \rangle\ 1000
\end{aligned}
همانطور که مشاهده میشود، معادله حاکم بر مکانیزم چهار میلهای چرخشی- نوسانی براساس این اندازه از طول لینکها و فواصل، برقرار است. بنابراین انتظار میرود که مکانیزم به درستی حرکت موردنظر را انجام دهد.
نحوه اتصال لینکها به صورت مفاصل دورانی در بخش بعدی توضیح داده میشود.
مقیدسازی لینکها به یکدیگر
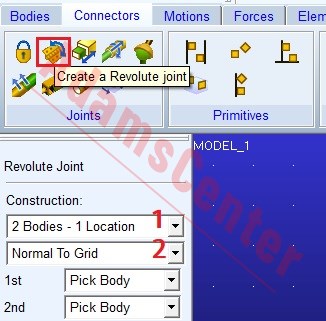
تمامی اتصالات در این مکانیزم چهارلینکی به صورت چرخشی هستند، بنابراین باید از ویژگی Revolute Joint در Adams برای اتصال آنها به یکدیگر استفاده کرد. در زبانه Connectors و در بخش Joints بر روی آیکون Create a Revolute Joint کلیک کرده تا تنظیمات ایجاد آن باز شود:
تعریف قید Revolute
در این بخش، مطابق شکل ۸، ۲Bodies – ۱Location را برای حالت اتصال تنظیم (۱) و جهت محور دوران را به صورت عمود بر صفحه کاری یا Normal To Grid تعیین کنید(۲).
با حرکت نشانگر موس در محیط کاری ( بعد از اعمال تنظیمات اتصال) متن زیر در نوار پایینی اعلانات نرمافزار ظاهر میشود:
Revolute Joint (Two bodies – One Location, Direction aligned to geometry feature): Select the fist body
در این متن توضیحات مربوط به تنظیمات و نوع اتصال نشان داده شده است و در پایان درخواست شده تا جسم اول برای اتصال انتخاب شود. برای اینکار، موس را حرکت داده و زمانی که کلمه ground در کنار آن ظاهر شد کلیک کنید تا زمین برای جسم اول ( لینک شماره ۱ در شکل ۱) تعیین شود. سپس موس را بر روی لینک دوم LINK_2 برده تا نام آن درکنار نشانگر ظاهر شود و آن را انتخاب میکنیم. نهایتا نرم افزار موقعیت اتصال را از ما میخواهد که برای اینکار نشانگر را به موقعیت نقطه O۲ برده تا نام آن نمایش داده شود، آن را انتخاب میکنیم تا در نهایت اولین اتصال (بین زمین و لینک ۲) مانند شکل ۹ ایجاد شود.
به همین صورت اتصال بین Link_2 و Link_3 را میتوان تعریف کرد، با این تفاوت که اینبار جسم اول به جای زمین Link_2 و جسم دوم نیز Link_3 و موقعیت اتصال نقطه B خواهد بود. برای اتصال بین لینک سوم و لینک چهارم نیز جسم اول Link_3، جسم دوم Link_4 و موقعیت اتصال نقطه C خواهد بود. و نهایتا در تعریف اتصال چرخشی بین لینک چهارم و زمین نیز جسم اول Link_4، جسم دوم ground و موقعیت اتصال نقطه O۴ باید تعریف شود.
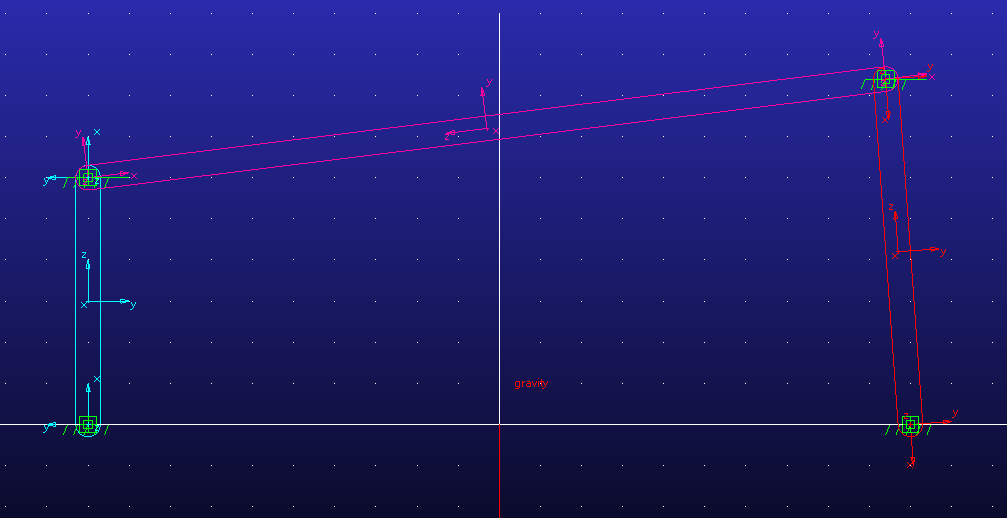
نهایتا شکل نهایی مکانیزم به صورت زیر خواهد بود:
جمع بندی
در این مطلب در رابطه با نحوه مدلسازی مکانیزم چهارلینکی در نرمافزار Adams بحث شد. بر اساس روابط بخش اول آموزش، یک مکانیزم چرخشی- نوسانی طراحی و توضیح نحوه تعریف اتصالات چرخشی بین لینکهای آن نیز ارائه شد. در مطالب بعدی در رابطه با نحوه سرعت دهی و حرکت این مکانیزم صحبت میکنیم.
ادامه آموزش: تحلیل سرعت و حرکت مکانیزم چهار لینکی
چنانچه سوالی در رابطه با این آموزش دارید، میتوانید در بخش “نمایش دیدگاهها / انتشار دیدگاه” مطرح کنید تا در کنار یکدیگر به آنها پاسخ دهیم.
برای بهتر شده آموزشها پذیرای نظرات، پیشنهادات و انتقادات ارزشمند شما هستم.
باتشکر از همراهی شما
دانلود و فعالسازی نرمافزار MSC Adams 2020
ویدئوی آموزش نصب و فعالسازی MSC Adams 2020
دیدگاهتان را بنویسید