Your cart is currently empty!
Category: آموزش نرم افزار Adams
آموزش نرمافزار Adams | آدامز
آموزش نرمافزار Adams به صورت ساده و روان در قالبهای متنی، تصویری و ویدئویی. Adams یکی از پرکاربردترین نرمافزارها در حوزهی تحلیل حرکتی و دینامیکی چند بدنه یا MBD (Multibody dynamic) در جهان است. با فراگیری آموزش نرم افزار Adams میتوانید انواع مکانیزم های مختلف مکانیکی را مدلسازی، تحلیل و بررسی کنید.
آموزش ها در این بخش شامل مباحث مدلسازی، شبیه سازی و حل انواع مسائل دینامیک ماشین در نرم افزار آدامز است.
با آموزش های تخصصی نرمافزار آدامز در سایت AdamsCenter.ir می توانید بازهی وسیعی از تحلیلهای حرکتی و دینامیکی را برای شبیهسازی و پیشبینی وضعیت تجهیزات مکانیکی انجام دهید.
مباحث مختلفی برای آموزش نرم افزار Adams در این بخش ارائه شده است:

مدلسازی مکانیزم لنگ و لغزنده در آدامز
مکانیزم لنگ و لغزنده یا لغزنده لنگی (Slider- Crank)، نوعی خاص از مکانیزم چهار لینکی چرخشی- نوسانی است که مفصل لینک چهارم آن در فاصله بی نهایت قرار میگیرد. مکانیزم لنگ- لغزنده کاربردهای بسیار گستردهای دارد و در صنایع مختلف از ساختار کلی آن استفادههای متفاوتی میشود. همچنین این مکانیزم از ساختارهای مهم در دروس دینامیک ماشین و ارتعاشات است. در این آموزش در رابطه با نحوه مدلسازی مکانیزم لنگ و لغزنده در نرمافزار Adams صحبت میکنیم و در حین این آموزش با نحوه ایجاد لینکها، بلوک و همچنین اتصالات چرخشی و انتقالی آشنا میشویم.
پیشنیازها:
مدلسازی سهبعدی در Adams – بخش اول
مدلسازی سهبعدی در Adams – بخش دوم
معرفی محیط Adams/viewمکانیزم لنگ و لغزنده
همانطور که گفتیم مکانیزم لنگ- لغزنده حالت خاصی از مکانیزم چهار میلهای است. اگر در مکانیزم چهار لینکی شکل ۱ طول لینک چهارم نامتناهی باشد، آنگاه نقطه C (اتصال بین لینک ۳ و لینک ۴) حرکت مستقیمالخط پیدا خواهد کرد. بنابراین لنگ چهارم را میتوان با یک لغزنده مانند شکل ۲ تعویض کنیم.
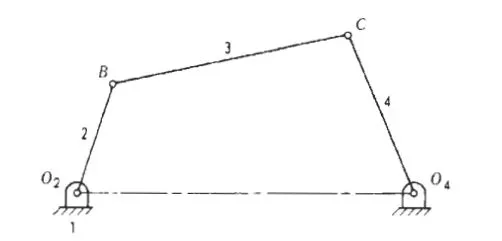
شکل ۱ – شماتیک یک مکانیزم چهارلینکی 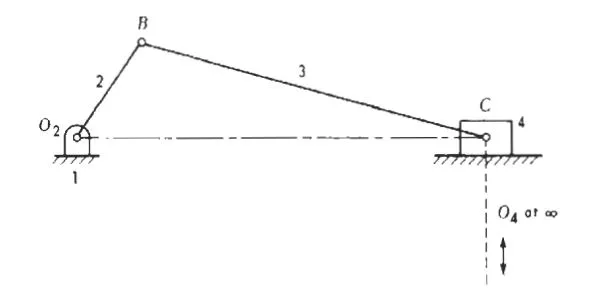
شکل ۲ – مکانیزم چهارلینکی لنگ- لغزنده مدلسازی مکانیزم لنگ و لغزنده در Adams
ایجاد لینکها (میلهها)
در قدم اول باید مطابق شکل لینک های دوم و سوم را ایجاد کرد. مطابق ” شروع طراحی در نرمافزار Adams” یک پروژه جدید در نرمافزار آدامز با واحدهای MMKS تعریف کنید. سپس در محیط Adams view از بخش Bodies و قسمت Solids ابزار ایجاد لینک (RigidBody: Link) را انتخاب میکنیم. در بخش تنظیمات Geometry ایجاد لینک، حالت New Part را انتخاب کرده و مشخصات اولین لینک (لینک ۲ در شکل ۲) را مطابق شکل ۳ تنظیم میکنیم.
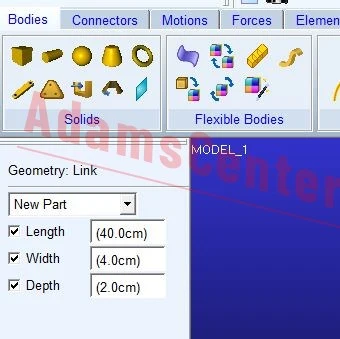
شکل ۳ – تنظیمات ایجاد لینک در آدامز – Geometry: Link in Adams پس از تنظیم کردن مقادیر فوق، موس را در محیط کاری ( Working Grid ) حرکت داده و در مختصات
(۰,۰,۵۰۰-)بر روی صفحه کاری کلیک کنید. تا موقعیت ابتدای لینک مشخص شود. موقعیت انتهای لینک را نیز با کلیک در مختصات(۰,۴۰۰,۵۰۰-)، تنظیم کنید.نکته: برای دانستن مختصات نشانگر موس، کلید F4 را فشار دهید تا پنجره Coordinates نمایان شود.
اولین لینک به صورت شکل ۴ است:
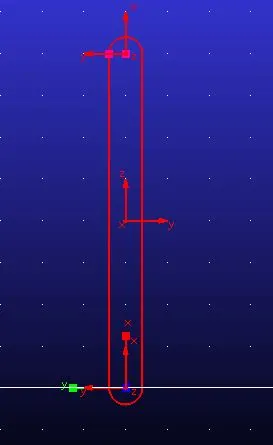
شکل ۴ – لینک ۲ از مکانیزم لنگ و لغزنده تغییر نام لینک
اگر در قسمت سمت چپ محیط کاری و در مرورگر ( Browse) زیر مجموعه Bodies را مشاهده کنید، نام اولین لینک به صورت PART_2 تعریف شده است. برای تغییر نام آن به Link_2، بر روی نام آن راست کلیک و گزینه Rename را نتخاب کنید. در پنجره Rename، در بخش New Name، PART_2 را به Link_2 تغییر دهید.
برای ایجاد لینک سوم، دوباره بر روی آیکون ایجاد لینک کلیک کرده و مقادیر عرض (Width) و عمق (Depth) آن را به ترتیب برابر ۴ و ۲ سانتیمتر تعریف کنید. اما تیک طول لینک (Length) را غیرفعال کنید تا بتوانید موقعیت انتهایی لینک و طول آن را به طور دلخواه تنظیم کنید. برای تعیین نقطه ابتدایی لینک ۳، بر روی مارکر انتهایی لینک ۲ کلیک میکنیم. سپس با حرکت موس در مختصات
(۰,۰,۴۰۰)کلیک میکنیم تا انتهای لینک ۳ مشخص و لینک ایجاد شود.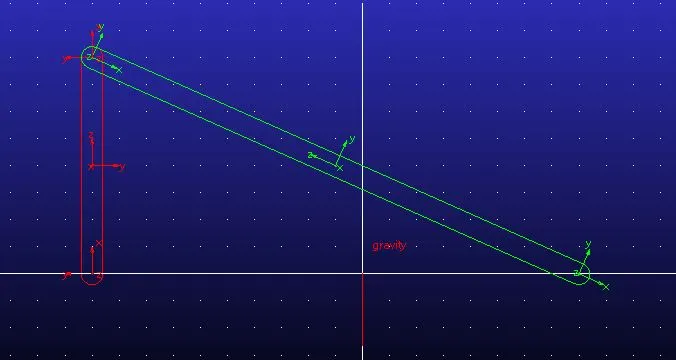
شکل ۵ – نمای لینک های دوم و سوم تا این مرحله از مدلسازی مطابق توضیحات تغییر نام در بخش قبلی، نام این پارت جدید را نیز به Link_3 تغییر دهید.
ایجاد بلوک لغزنده
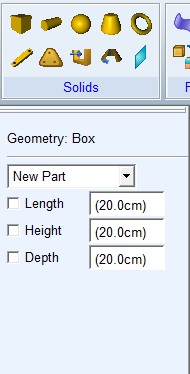
برای ایجاد یک مکعب مستطیل به عنوان لغزنده میتوان از ابزار ایجاد Box در بخش Solids استفاده کرد. بر روی آیکون ایجاد باکس کلیک و تنظیمات هندسه آن را همانند شکل ۶ تعریف کنید.
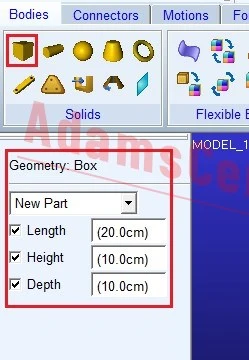
شکل ۶ – تنظیمات ایجاد بلوک لغزنده پس از تنظیم مقادیر مطابق شکل ۶، نشانگر موس را به صفحه کاری ببرید. همانطور که در کنار نشانگر مشخص است، برای ایجاد بلوک باید مختصات گوشه پایینی آن را تعیین کنید. برای اینکار در مختصات
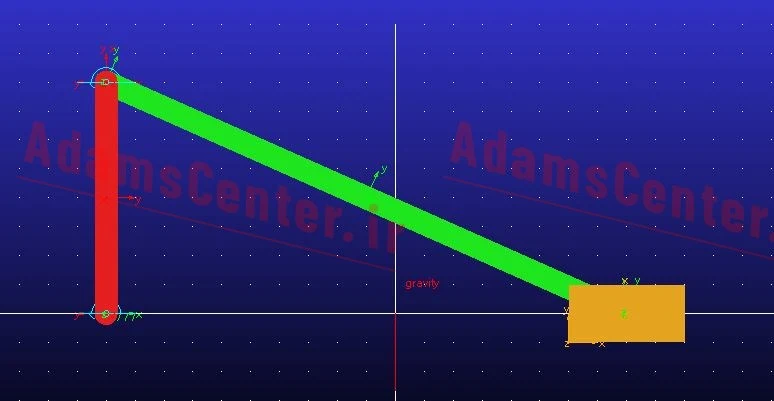
(۰,۵۰-,۲۵۰)کلیک کنید.در صورت انجام مراحل بالا، نمای کلی مکانیزم لنگ و لغزنده در Adams، مطابق شکل ۷ میشود.
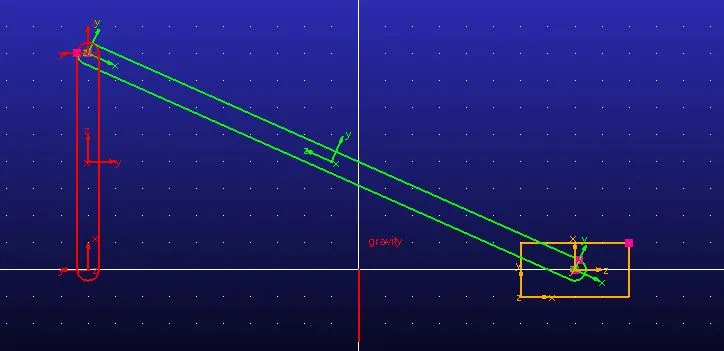
شکل ۷ – مدل مکانیزم لنگ و لغزنده در نرمافزار آدامز مطابق قطعات قبلی مکانیزم، نام لغزنده را در مرورگر کناری به Slider ( یا Link_4) تغییر دهید.
تغییر مکان لغزنده
نکته مهمی که در این مرحله باید به آن توجه کرد، اینست که با توجه به ساختار و نحوه ایجاد بخشها، مرکز هندسه لغزنده مطابق با مارکر انتهای لینک ۳ نیست و برای روی هم قرار دادن این دو نقطه باید طبق مراحل زیر پیش بروید:
مرحله اول: با کلیک بر روی آیکون
 در بالای محیط view، نمای صفحه کاری را به حالت نمایش از نمای کناری تغییر دهید. (نمای شکل ۸)
در بالای محیط view، نمای صفحه کاری را به حالت نمایش از نمای کناری تغییر دهید. (نمای شکل ۸)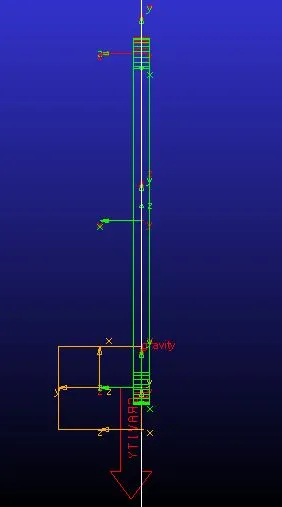
شکل ۸ – نمای کناری مدل قبل از جابهجایی مرحله دوم: از منوی کناری نرمافزار بر روی نام لغزنده (Slider یا Link_4) کلیک کنید. با اینکار لغزنده در حالت انتخاب شده قرار گرفته و از سایر قطعات مکانیزم متمایز میشود. سپس بر روی آیکون Position
 ( در بالای محیط کاری) کلیک کنید.
( در بالای محیط کاری) کلیک کنید.مرحله سوم: در تنظیمات باز شده مربوط به آیکون Position، در بخش جابهجایی یا Translate مقدار Distance را ۵cm تنظیم کنید. سپس بر روی دکمه حرکت به راست کلیک کنید تا لغزنده ۵ سانتیمتر در جهت راست جابهجا شود.
نکته: برای جابهجایی در این مرحله باید توجه داشت که نمای کاری همواره حتما در حالت نمایش از کنار باشد.
پس از طی مراحل شکل مکانیزم از نمای کناری مطابق شکل ۹ خواهد شد.
شکل ۹ – نمای کناری مکانیزم بعد از جابهجایی لغزنده برای ادامه روند مدلسازی، حالت نمایش از روبرو را با کلیک بر روی آیکون
 فعال کنید.
فعال کنید.مقیدسازی قطعات مکانیزم لنگ و لغزنده در Adams
پس از مدلسازی مکانیزم لنگ و لغزنده برای اتصال قطعات آن باید از دو نوع اتصال دورانی و خطی استفاده کرد. براساس شکل ۲، اتصال بین لینک ۱ (Ground) و لینک دوم ( Link_2)، اتصال بین لینک دوم و لینک سوم ( Link_3) و اتصال بین لینک سوم و لفزنده یا لینک چهارم (Slider / Link_4) باید به صورت دورانی باشد. همچنین لغزنده و زمین یا همان لینک اول باید به صورت حرکت در راستای خط راست به یکدیگر مقید شوند. در ادامه درباره نحوه مقیدسازی قطعات مکانیزم لنگ و لغزنده صحبت میکنیم.
تعریف اتصالات ( قیدهای) چرخشی
اولین اتصال دورانی بین زمین (لینک ۱) و لینک دوم است. برای ایجاد این نوع قید در محیط View از زبانه Connectors و در قسمت Joints، آیکون ایجاد قید چرخشی (Create a Revolute Joint) را انتخاب کنید. بدون تغییر تنظیمات پیشفرض آن، با حرکت موس در صفحه کاری و نمایش ground در کنار آن، بر روی صفحه کلیک کنید. با اینکار زمین به عنوان جسم اول اتصال، انتخاب میشود. برای انتخاب جسم دوم نیز نشانگر را بر روی لینک ۲ ببرید تا نام آن ( Link_2) در کنار نشانگر ظاهر شود. بر روی آن کلیک کنید تا جسم دوم اتصال نیز مشخص شود. در نهایت برای تعیین موقعیت اتصال، مارکر ابتدایی لینک ۲ ( Link_2.MARKER_1) را انتخاب کنید.
در صورت طی مراحل بالا، اولین اتصال مانند شکل ۱۰ ایجاد میشود.
شکل ۱۰ – اتصال دورانی بین زمین و لینک ۲ به همین شکل بین لینک ۲ و لینک ۳ یک اتصال دورانی با موقعیت Link2.MARKER_2 ایجاد کنید. سپس بین لینک ۳ و لینک ۴ (لغزنده) یک اتصال دورانی با موقعیت Link_3.MARKER_4 تعریف کنید.
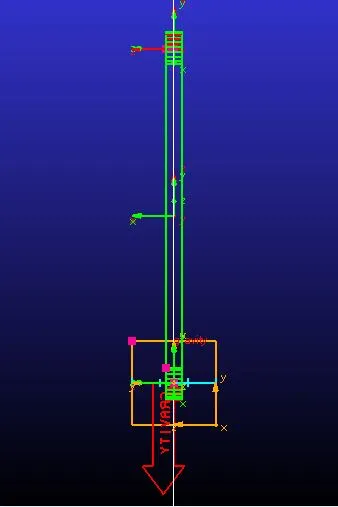
برای مقیدسازی لغزنده و زمین به صورت حرکت در راستای یک خط مستقیم، باید از بین ابزارهای بخش Joints، ابزار ایجاد اتصال انتقالی ( Create a Translational Joint) را انتخاب کرد. همانند تعریف اتصال دورانی، بدون تغییر تنظیمات این اتصال، لغزنده ( Slider یا Link_4) را به عنوان جسم اول و زمین (ground) را به عنوان جسم دوم تعیین کنید. موقعیت اتصال را در نقطه Slider.cm تنظیم کنید. چهارمین مرحله از تعریف اتصال چرخشی، انتخب جهت حرکت است که باید با حرکت موس در راستای مورد نظر محور حرکت را انتخاب کرد. نشانگر موس را به سمت راست نقطه اتصال ببرید تا محور cm.Z نمایش داده شود، سپس کلیک کنید تا این محور به عنوان راستای حرکت تنظیم شود.
با طی مراحل گفته شده، چهارمین اتصال در مکانیزم، به صورت قید انتقالی همانند شکل ۱۱ ایجاد میشود.
شکل ۱۱ – اتصال انتقالی (حرکت مستقیم الخط) بین لینک سوم و لغزنده تغییر نام اتصالات
برای اینکه نام اتصالات مطابق با شکل ۲ باشد باید نام پیشفرض آنها را تغییر داد. از منوی درختی کنار محیط کاری زیر مجموعه Connectors را باز کنید. مطابق شکل ۲ و براساس ترتیب ایجاد اتصالات، نام JOINT_1 را به O_2، سپس JOINT_2 را به B و JOINT_3 را به C تغییر دهید. نهایتا اتصال بین لینک ۴ (لغزنده) با زمین را از JOINT_4 به O_4 تغییر دهید.
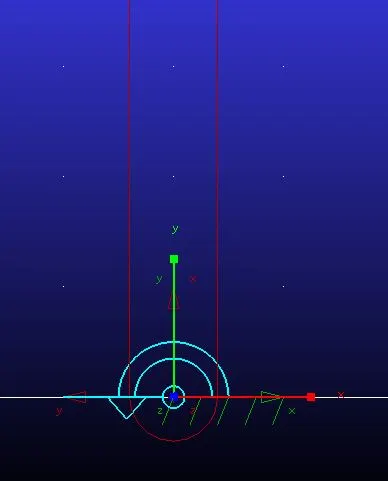
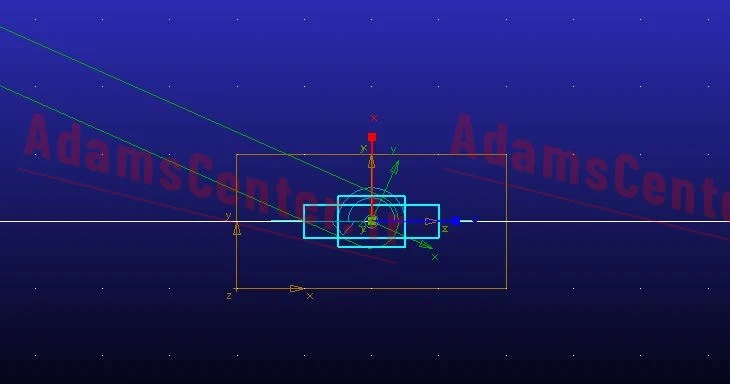
در نهایت مدل نهایی مکانیزم لنگ و لغزنده در نرم افزار Adams از نماهای روبرو و ایزومتریک مطابق شکلهای ۱۲ و ۱۳ خواهد بود.
شکل ۱۲ – نمای جلوی مکانیزم لنگ و لغزنده در Adams 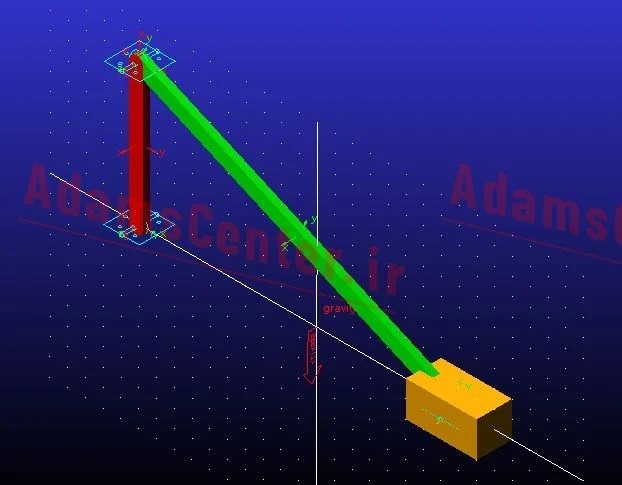
شکل ۱۳ – نمای ایزومتریک مکانیزم لنگ و لغزنده در Adams جمع بندی
در این مطلب در رابطه با نحوه مدلسازی مکانیزم لنگ و لغزنده در نرم افزار Adams صحبت کردیم. همچنین در رابطه با چگونگی تعریف اتصالات چرخشی و انتقالی بین قطعات مختلف در محیط view نرم افزار Adams نیز بحث شد. از مدل طراحی شده در این مطلب می توان برای حل مسائل مختلف مرتبط با مکانیزم لنگ و لغزنده استفاده کرد.
در مطالب بعدی سایت AdamsCenter.ir در رابطه با نحوه تعریف سرعت دورانی دلخواه و تحلیل سرعت و شتاب لینکهای مختلف مکانیزم لنگ و لغزنده صبت خواهیم کرد.
چنانچه سوالی در رابطه با این آموزش دارید، میتوانید در بخش “نمایش دیدگاهها / انتشار دیدگاه” مطرح کنید تا در کنار یکدیگر به آنها پاسخ دهیم.
برای بهتر شده آموزشها پذیرای نظرات، پیشنهادات و انتقادات ارزشمند شما هستم.
باتشکر از همراهی شما
دانلود و فعالسازی نرمافزار MSC Adams 2020
ویدئوی آموزش نصب و فعالسازی MSC Adams 2020
تحلیل سرعت مکانیزم چهار لینکی در Adams
در پست قبلی با عنوان “مدلسازی مکانیزم چهار لینکی در Adams” درباره نحوه طراحی این مکانیزم صحبت کردیم و در نهایت نیز طرح شکل ۱ را ایجاد در محیط view ایجاد کردیم. در این مطلب در مورد چگونگی تعریف سرعت دورانی برای مکانیزم و همچنین تحلیل سرعت و حرکت در اتصالات مکانیزم چهار لینکی صحبت میکنیم.
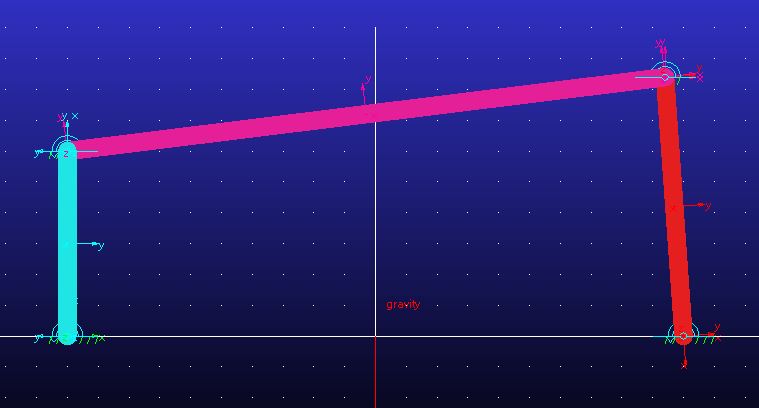
شکل ۱ – مکانیزم چهار لینکی چرخشی- نوسانی در محیط Adams تعریف حرکت برای یک اتصال
برای تعریف حرکت در محیط view نرمافزار آدامز میتوان از امکانات زبانه Motions استفاده کرد. در این زبانه برای ایجاد حرکت دورانی از ابزارهای بخش Joint Motions، مطابق شکل ۲ بر روی آیکون Rotational Joint Motion کلیک کنید (۱) تا بخش تنظیمات آن در کنار محیط کاری باز شود. سرعت آن را برابر با مقدار پیشفرض ۳۰ قرار دهید (۲).
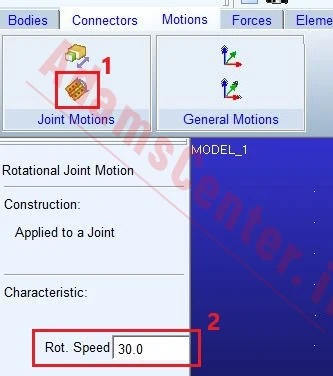
شکل ۲ – تنظیمات ایجاد حرکت اتصال دورانی در Adams – Rotational Joint Motion - نکته: واحد پیشفرض برای سرعت با توجه به انتخاب سیستم MMKS در ابتدای طراحی مدل، بر اساس درجه بر ثانیه (deg/s) است.
پس از تنظیم مقدار سرعت، نشانگر موس را در محیط کاری به موقعیت اتصال اول (بین لینک ۲ و زمین) در نقطه O_2 ببرید. پس از ظاهر شدن نام اتصال مربوطه (JOINT_1) کلیک کرده تا این سرعت برای این اتصال تعریف شود (شکل ۳).
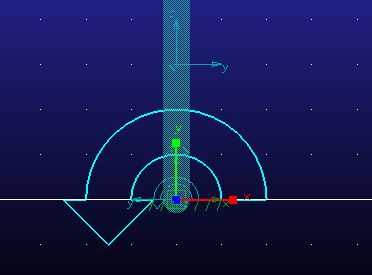
شکل ۳ – Motion ایجاد شده برای Joint نقطه O_2 تا این مرحله از مدلسازی مکانیزم، تمامی قیود تعریف ایجاد شدند. همچنین برای لینک ۲ حرکت دورانی مشخصی به عنوان ورودی شد. در بخش بعدی در رابطه با شبیهسازی حرکت صحبت میکنیم.
شبیهسازی حرکت مکانیزم چهار لینکی در Adams
برای شبیهسازی حرکت مکانیزم، مطابق شکل ۴، در زبانه Simulation از بخش ابزارهای Simulate بر روی آیکون Run an Interactive Simulation کلیک کنید (۱) تا پنجره Simulation Control باز شود. در این پنجره مقدار End Time را به عنوان زمان شبیهسازی برابر ۳۰ ثانیه قرار دهید و Steps یا بخشهای زمانی را برابر ۲۰۰ تنظیم کنید (۲).
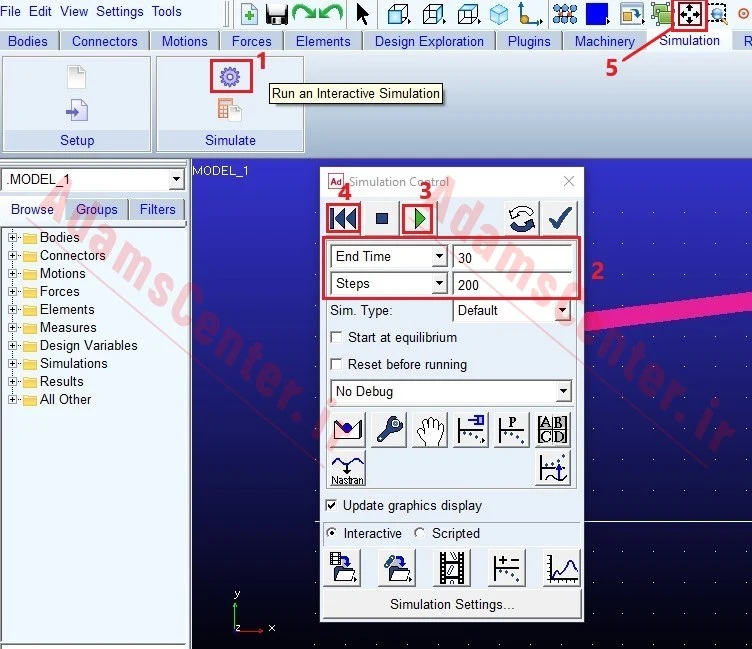
شکل ۴ – فراخوانی پنجره کنترل شبیهسازی در Adams – Simulation Control بر روی آیکون View Fit. کلیک کنید (شماره ۵ در شکل ۴) تا نمای کامل مکانیزم را ببنید، سپس دکمه Run را بزنید.
درصورتی که تمامی مراحل مدلسازی را مطابق با آموزش طی کرده باشید، حرکت مکانیزم به صورت دوران کامل لینک ۲ و نوسان لینک ۴ خواهد بود.
پس از اتمام شبیهسازی بر روی دکمه Reset کلیک کنید (شماره ۴ در شکل ۴) تا مکانیزم به حالت اولیه خود برگردد.
شکل ۵ – حرکت مکانیزم چهار لینکی چرخشی- نوسانی در نرمافزار Adams بررسی سرعتها
پس از اینکه شبیه سازی برای یک دور کامل انجام شد، میتوان برای بررسی سرعتها اقدام کرد. در پنجره Simulation Control بر روی آیکون Plotting کلیک میکنیم تا محیط Adams PostProcessor فراخوانی شود.
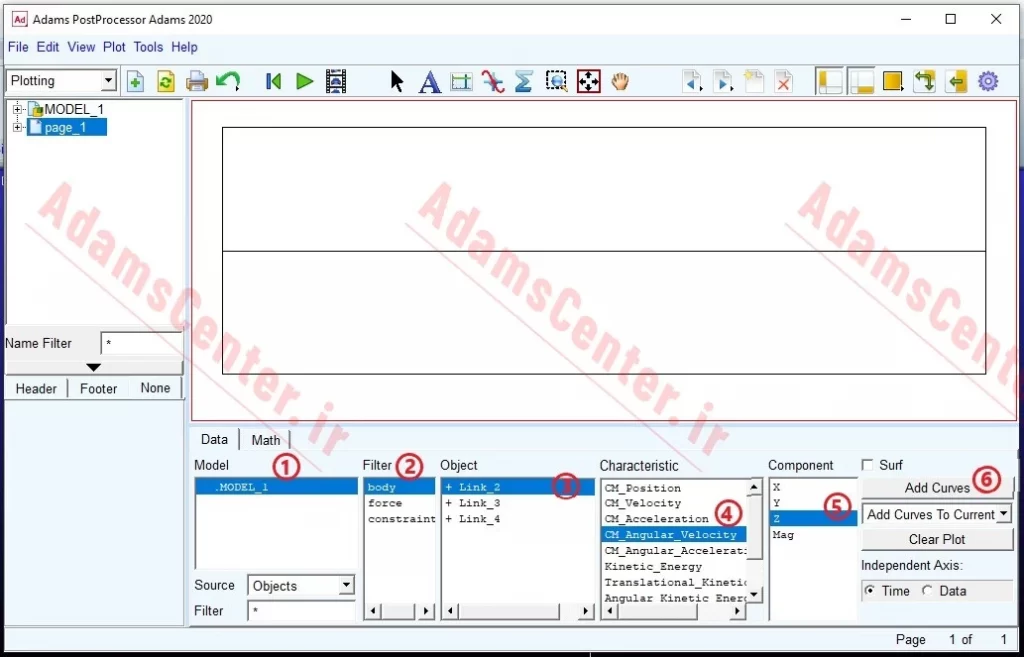
مطابق با شکل ۶، در بخش data در قسمت پایینی پنجره PostProcessor باید نام مدل را انتخاب کرد (در این پروژه نام مدل به صورت پیشفرض MODEL_1 تنظیم شده است). سپس در قسمت Filter گزینه Body را انتخاب میکنیم. حالا در بخش Objects باید انتخاب کرد که تحلیل چه قسمت از مکانیزم را نیاز داریم، در قدم اول لینک ۲ ( Link_2) را انتخاب و سپس در قسمت Characteristic برای دیدن سرعت دورانی یا زاویهای گزینه CM_Angular_Velocity را انتخاب میکنیم. در نهایت نیز محوری که قرار است سرعت دورانی حول آن بررسی شود باید انتخاب شود که در این پروژه، همان محور عمود برصفحه کاری یعنی محور Z است. پس از انتخاب موارد فوق، بر روی دکمه Add Curves کلیک میکنیم. با اینکار نمودار سرعت دورانی لینک ۲ در محیط اصلی پنجره PostProcessor نمایش داده میشود.
شکل ۶ – مراحل ایجاد نمودار سرعت زاویهای هر یک از لینکهای مکانیزم چهار میلهای در محیط PostProcessor سرعت دورانی لینک دوم
همانطور که در شکل ۷ مشاهده میشود، با توجه به اینکه یک سرعت ثابت (۳۰ درجه بر ثانیه) برای لینک ورودی (لینک شماره ۲ – Link_2) تعریف کردیم، تغییرات سرعت در این نمودار نیز در طول زمان شبیهسازی ثابت است.
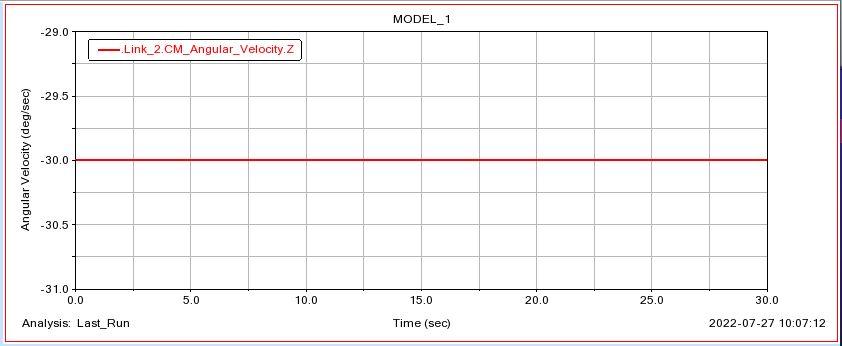
شکل ۷ – نمودار سرعت دورانی Link_2 سرعت دورانی لینک چهارم
برای نمایش نمودار سرعت دورانی لینک چهارم، مراحل گفته شده مطابق شکل ۶ را طی کنید (با توجه به اینکه در بخش Objects باید Link_4 انتخاب شود). سپس بر روی گزینه Add Curves کلیک کرده تا نمودار جدید بر روی نمودار قبلی ایجاد شود.
نمودار سرعت دورانی لینک خروجی (لینک چهارم – Link_4) مطابق شکل ۸ است:
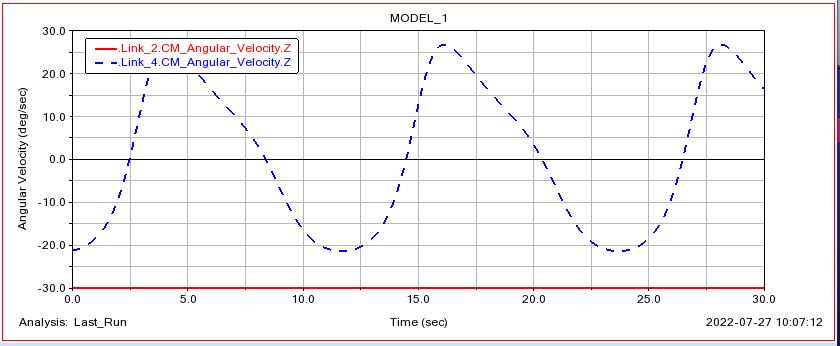
شکل ۸ – نمودار سرعت دورانی Link_2 در محیط PostProcessor - نکته: در صروتی که تمایلی ندارید نمودار جدید بر روی نمودار قبلی ایجاد شود میتوانید به جای انتخاب Add Curves در مرحله ۶ شکل ۶، تیک گزینه Surf را فعال کنید، با اینکار نمودار قبلی پاک و نمودار جدید ایجاد میشود.
همانطور که در شکل ۸ مشخص است، به دلیل حرکت چرخشی- نوسانی مکانیزم، سرعت دورانی لینک نهایی به صورت نوسانی با افزایش و کاهش در دو جهت مثبت و منفی است.
به همین شکل نیز میتوان سرعت دورانی لینک سوم را بدست آورد.
جمعبندی
در این مطلب در رابطه با نحوه تعریف حرکت در مکانیزم چهار لینکی ( میله ای) در نرمافزار Adams صحبت کردیم، سپس نمودارهای سرعت دورانی لینکهای دوم و چهارم این مکانیزم را نیز با کمک امکانات محیط Adams PostProcessor بدست آوردیم.
چنانچه سوالی در رابطه با این آموزش دارید، میتوانید در بخش “نمایش دیدگاهها / انتشار دیدگاه” مطرح کنید تا در کنار یکدیگر به آنها پاسخ دهیم.
برای بهتر شده آموزشها پذیرای نظرات، پیشنهادات و انتقادات ارزشمند شما هستم.
باتشکر از همراهی شما
دانلود و فعالسازی نرمافزار MSC Adams 2020
ویدئوی آموزش نصب و فعالسازی MSC Adams 2020
مدلسازی مکانیزم چهارلینکی در آدامز
در میان انواع مکانیزمها و اهرمبندیهای مختلف در دینامیک ماشین، رایجترین و ویژهترین نوع، مکانیزم چهارلینکی یا چهارمیلهای است. بسیاری از مکانیزمهای متداول در دستگاههای مکانیکی را میتوان با ترکیبی از مکانیزمهای چهار میلهای شناسایی کرد. در این مطلب توضیحاتی راجعبه این مکانیزمها ارائه میشود و در ادامه آن نیز آموزش نحوه مدلسازی یک مکانیزم چهار میلهای چرخشی- نوسانی در نرمافزار Adams ارائه میشود.
انواع مکانیزمهای چهار لینکی
یک مکانیزم ۴ لینکی در حالت کلی میتواند به صورتهای مختلف چرخشی- نوسانی (Crank- Rocker)، نوسانی- نوسانی (Double Rocker) و یا چرخشی- چرخشی (Double Crank) حرکت کند. در این مطلب درباره با حالت چرخشی- نوسانی بحث و آموزش نحوه مدلسازی آن در نرمافزار Adams ارائه خواهد شد.
مکانیزم چهارلینکی چرخشی- نوسانی
در این مکانیزم، با حرکت دورانی لینک ۲ (شکل ۱)، لینک ۴ به صورت دورانی حرکت نوسانی خواهد داشت. برای مدلسازی این مکانیزم، در ابتدا لازم است تا با اصول اولیه حاکم بر ساختار این مکانیزمها آشنا شویم. در طراحی این مکانیزمها باید شرایط هندسی خاصی برآورده شود تا بتوان لینکها را به شکل گفتهشده به حرکت درآورد.
مدلسازی مکانیزم چهارلینکی در آدامز برای مکانیزم ۴ لینکیِ چرخشی-نوسانی با نمادهای شکل ۱ انجام خواهد شد:
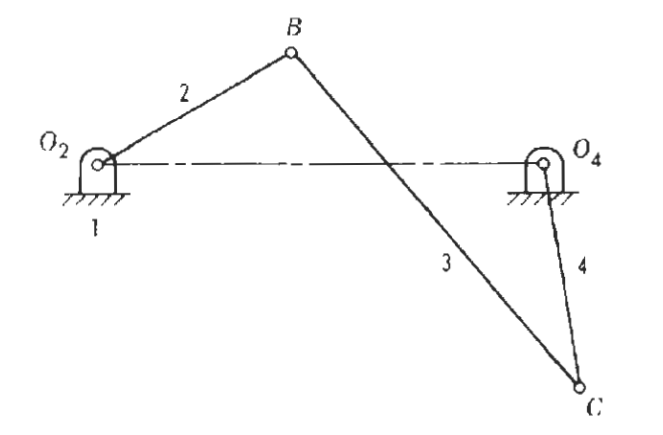
شکل ۱ – مکانیزم چهار لینکی چرخشی- نوسانی لینک ۲ در شکل ۱، به طور کامل حول لولای O۲ دورانی و لینک ۴ توسط لینک (رابط) ۳، حول O۴ نوسان میکند. این حرکت لینکها هنگامی کار میکند که شرایط زیر برقرار باشد:
\begin{aligned} O_2B + BC + O_4C\ \rangle\ (O_2O_4) \\ O_2B + O_2O_4 + O_4C\ \rangle\ (BC) \\ O_2B + BC - O_4C\ \langle\ (O_2O_4) \\ BC - O_2B + O_4C\ \rangle\ (O_2O_4) \end{aligned}نامساویهای بالا براساس اصول هندسی، امکان ایجاد حرکت چرخشی- نوسانی را در مکانیزم ۴ میلهای بیان میکنند. بنابراین هر مکانیزم چهار لینکی باید شرایط هندسی مربوطه را داشته باشد تا بتوان طبق مدل مورد انتظار به حرکت درآید.
مدلسازی مکانیزم چهارلینکی در نرمافزار Adams
تعریف نقاط یا Point
برای شروع مدلسازی، بعد از تعریف یک پروژه جدید به صورت MMKS که در ” شروع کار با Adams” به آن اشاره کردیم، وارد محیط view شوید. در این مدلسازی باید ۴ نقطه O۲، B، C، و O۴ را برای ایجاد لینکها مشخص کرد، مختصات این چهار نقطه میتواند به صورت زیر باشد:
\begin{aligned} O_2 = (-500,0,0) \\ B = (-500,300,0) \\ C = (470,420,0) \\ O_4 = (500,0,0) \end{aligned}- نکته: مقادیر بالا باید به درستی تعریف شوند تا روابط بخش قبل برقرار باشند. در غیر اینصورت در طول شبیهسازی حرکت مکانیزم در نرمافزار Adams، برنامه با خطا مواجه خواهد شد و یا اینکه لینکها به صورتهای دیگری حرکت خواهد داشت.
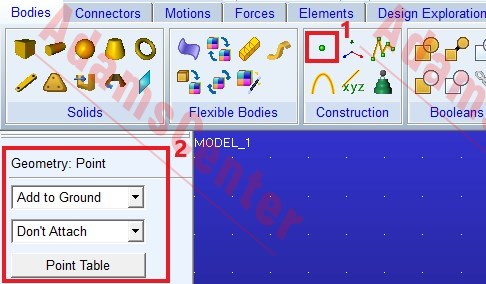
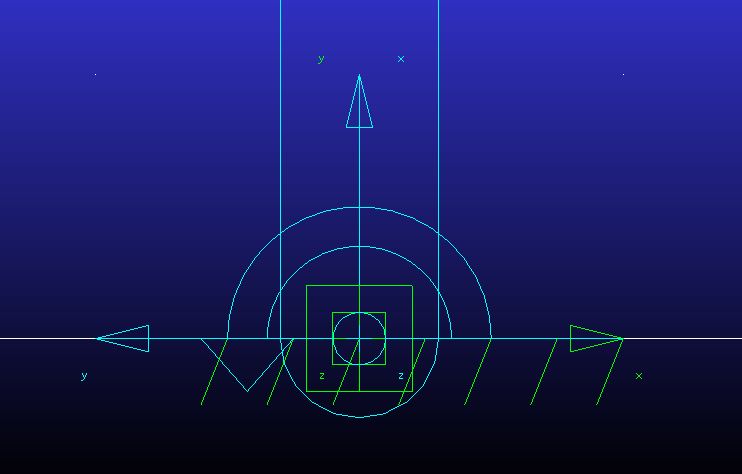
برای ایجاد نقاط در محیط view نرمافزار آدامز باید از ابزارهای بخش Construction در زبانه Bodies استفاده کرد. مطابق شکل ۲، بر روی آیکون مربوط به ایجاد نقطه ( Construction Geometry: Point) کلیک کنید (۱). بخش تنظیمات مربوطه در بالای منوی درختی ظاهر میشود (۲)، دو گزینه مربوطه را مانند شکل تنظیم کنید:
شکل ۲ – نحوه ایجاد نقطه یا Point در Adams نشانگر موس را به محیط کاری (Working Grid) نرمافزار ببرید تا در بخش نوار فرمان (در گوشه پایین سمت چپ نرمافزار) پیغام Point: Select the point location ظاهر شود، سپس موقعیت موردنظر برای ایجاد نقطه یا Point اول را مشخص کنید. برای اینکار نشانگر را به مختصات ایجاد نقطه O۲ ببرید ( برای نمایش در لحظه مختصات نشانگر کلید F4 را فشار دهید)، وقتی مختصات موردنظر در کنار موس نمایش داده شد با یکبار کلیک موس، نقطه O۲ را ایجاد کنید.
همین کار را میتوانید برای ایجاد سه نقطه دیگر نیز انجام دهید، اما در صورتی که در مختصات یابی دقیق برخی نقاط (مثل نقطه C) نشانگر موس در موقعیت درست قرار نگرفت میتوانید با راست کلیک در هر جای صفحه کاری پنجره تعریف مختصات ( LocationEvent ) را فراخوانی کنید و در این پنجره به صورت دستی مختصات مورد نظر را تنظیم و Apply کنید.
با تعریف نقاط فوق نمای شکل ۳ را خواهیم داشت:
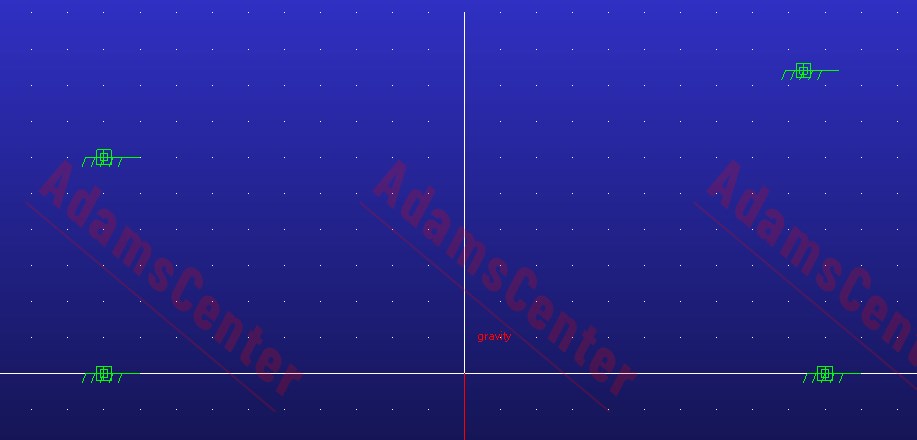
شکل ۳ – نقاط تعریف شده برای ایجاد مکانیزم چهار لینکی در مطلب معرفی محیط Adams/view درباره کلیدهای میانبر بخوانید.
تغییر نام نقاط
در منوی درختی مرورگر ( Browse) به زیر مجموعه Bodies و بعد زیر مجموعه ground بروید تا نام چهار نقطه جدید که به صورت POINT_1 تا ۴ شماره گذاری شدهاند ظاهر شود. برای تغییر نام اولین نقطه، روی POINT_1 راست کلید و گزینه Rename را انتخاب کنید تا پنجره Rename باز شود، نام O_2 را برای آن تنظیم کنید (شکل ۴).
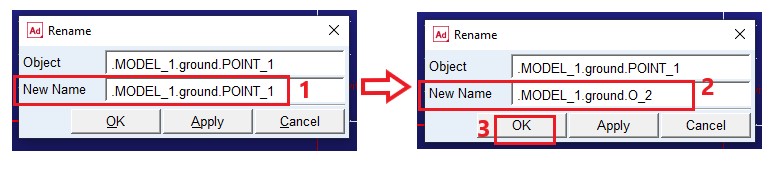
شکل ۴ – تغییر نام یک بخش در Adams نام سایر نقاط را نیز به همین صورت به B ، C و O_4 تغییر دهید.
ایجاد لینک ها در Adams
اکنون، اولین لینک از مکانیزم چهارلینکی موردنظر، یعنی لینک یا میله O۲C باید ایجاد شود. در بخش Solids در زبانه Bodies بر روی آیکون ایجاد لینک یا RigidBody: Link کلیک کنید تا تنظیمات Geometry آن در بالای منوی درختی ظاهر شود. New Part را برای منوی اول، تنظیم و تیک دو پارامتر عمق و عرض ( Depth و Width ) را فعال و مقدار آنها را به ترتیب ۲cm و ۳cm تنظیم میکنیم. سپس بر روی نقطه O۲ کلیک و انتهای لینک را نیز در نقطه B تنظیم میکنیم. بدین صورت اولین لینک ایجاد خواهد شد. لینک بعدی را بدین صورت که ابتدای آن نقطه B (انتهای لینک اول) و انتهای آن نقطه C باشد، ایجاد میکنیم. در نهایت آخرین لینک را نیز به همین شکل و براساس شکل ۱ ایجاد میکنیم تا در نهایت مدل شکل ۵ را در Adams/view داشته باشیم:
شکل ۵ – مدل مکانیزم چهار میله در Adams همانطور که در زیرمجموعه Bodies در منوی درختی کنار محیط کاری مشخص است، نرمافزار نام بخشهای جدید را به صورت PART_2، PART_3 و PART_4 تنظیم کرده است. ما به ترتیب ایجاد هر لینک، نام آنها را به Link_2، Link_3 و Link_4 تغییر میدهیم تا نامها همانند صورت مسئله در شکل ۱ شوند.
- نکته: لینک ۱ باید زمین باشد که در اینجا به صورت پیشفرض در منوی درختی با نام ground مشخص است.
بررسی طول لینکها
همانطور که در بخش اول این آموزش اشاره شد، باید روابط مربوط به حرکت چرخشی- نوسانی در مکانیزم حاکم باشد تا این مکانیزم چهار لینکی به درستی حرکت کند. بنابراین طول هر کدام از لینکهای ایجاد شده، برای صحتسنجی رابطه مکانیزم چرخشی- نوسانی، باید مشخص شوند.
برای اینکه متوجه شوید طول لینک شماره ۲ چه مقدار است؟ زیر مجموعه نام آن در منوی درختی مرورگر را باز، سپس بر روی بخش هندسی آن که احتمالا با نام LINK_5 مشخص است، راست کلیک و گزینه info را انتخاب کنید. با اینکار پنجره information باز میشود (شکل ۶).
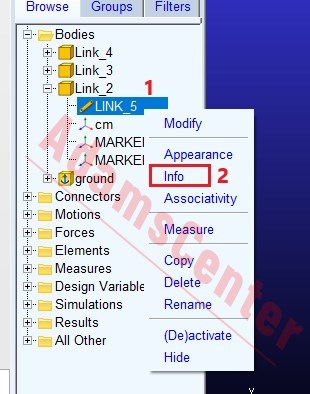
شکل ۶ – نحوه فراخوانی پنجره اطلاعات بخش ایجاد شده در آدامز اطلاعات مختلفی از مدل هندسی قطعه در پنجره information قرار دارد. که برای Link_2 به صورت شکل ۷ خواهد بود:
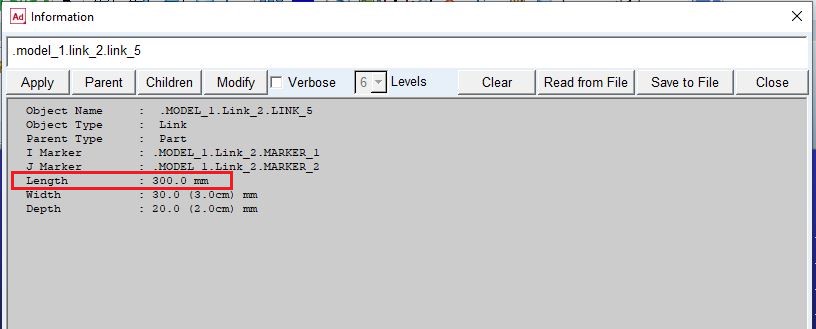
شکل ۷ – پنجره information یک Part در Adams طول لینک موردی است که در این بخش لازم داریم تا درباره آن بدانیم، این مورد در قسمت Length مشخص است. برای LINK_2 این مقدار برابر با ۳۰۰mm است. برای لینکهای سوم و چهارم نیز به همین نحو طول آنها را مشخص میکنیم و فاصله دو مرکز دوران O۲ و O۴ نیز براساس موقعیتی که برای آنها تعریف کردیم برابر ۱۰۰۰mm است (فاصله مختصات
_2O=(0,0,-500)تا_4O=(0,0,500)). درنهایت اندازههای زیر را برای این مکانیزم چهارمیلهای خواهیم داشت:\begin{aligned} O_2B = 300mm,\ BC = 977mm,\ O_4C = 421mm,\ O_2O_4 = 1000mm \end{aligned}صحتسنجی طول لینکها
بر اساس رابطه مکانیزم چهار لینکی چرخشی- نوسانی و طول هر لینک، داریم:
\begin{aligned} O_2B + BC + O_4C\ \rangle\ (O_2O_4) \rightarrow 300+977+421\ \rangle\ 1000 \\ O_2B + O_2O_4 + O_4C\ \rangle\ (BC) \rightarrow 300+1000+421\ \rangle\ 977 \\ O_2B + BC - O_4C\ \langle\ (O_2O_4) \rightarrow 300+977-421\ \langle\ 1000 \\ BC - O_2B + O_4C\ \rangle\ (O_2O_4) \rightarrow 977-300+421\ \rangle\ 1000 \end{aligned}همانطور که مشاهده میشود، معادله حاکم بر مکانیزم چهار میلهای چرخشی- نوسانی براساس این اندازه از طول لینکها و فواصل، برقرار است. بنابراین انتظار میرود که مکانیزم به درستی حرکت موردنظر را انجام دهد.
نحوه اتصال لینکها به صورت مفاصل دورانی در بخش بعدی توضیح داده میشود.
مقیدسازی لینکها به یکدیگر
تمامی اتصالات در این مکانیزم چهارلینکی به صورت چرخشی هستند، بنابراین باید از ویژگی Revolute Joint در Adams برای اتصال آنها به یکدیگر استفاده کرد. در زبانه Connectors و در بخش Joints بر روی آیکون Create a Revolute Joint کلیک کرده تا تنظیمات ایجاد آن باز شود:
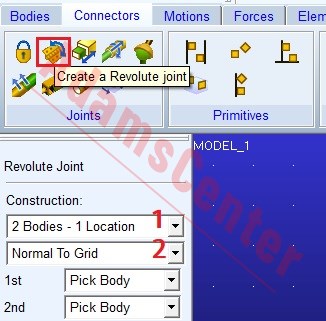
شکل ۸ – تنظیمات ایجاد اتصال چرخشی تعریف قید Revolute
در این بخش، مطابق شکل ۸، ۲Bodies – ۱Location را برای حالت اتصال تنظیم (۱) و جهت محور دوران را به صورت عمود بر صفحه کاری یا Normal To Grid تعیین کنید(۲).
با حرکت نشانگر موس در محیط کاری ( بعد از اعمال تنظیمات اتصال) متن زیر در نوار پایینی اعلانات نرمافزار ظاهر میشود:
Revolute Joint (Two bodies – One Location, Direction aligned to geometry feature): Select the fist body
در این متن توضیحات مربوط به تنظیمات و نوع اتصال نشان داده شده است و در پایان درخواست شده تا جسم اول برای اتصال انتخاب شود. برای اینکار، موس را حرکت داده و زمانی که کلمه ground در کنار آن ظاهر شد کلیک کنید تا زمین برای جسم اول ( لینک شماره ۱ در شکل ۱) تعیین شود. سپس موس را بر روی لینک دوم LINK_2 برده تا نام آن درکنار نشانگر ظاهر شود و آن را انتخاب میکنیم. نهایتا نرم افزار موقعیت اتصال را از ما میخواهد که برای اینکار نشانگر را به موقعیت نقطه O۲ برده تا نام آن نمایش داده شود، آن را انتخاب میکنیم تا در نهایت اولین اتصال (بین زمین و لینک ۲) مانند شکل ۹ ایجاد شود.
شکل ۹ – اتصال چرخشی بین لینک ۲ و زمین (لینک ۱) به همین صورت اتصال بین Link_2 و Link_3 را میتوان تعریف کرد، با این تفاوت که اینبار جسم اول به جای زمین Link_2 و جسم دوم نیز Link_3 و موقعیت اتصال نقطه B خواهد بود. برای اتصال بین لینک سوم و لینک چهارم نیز جسم اول Link_3، جسم دوم Link_4 و موقعیت اتصال نقطه C خواهد بود. و نهایتا در تعریف اتصال چرخشی بین لینک چهارم و زمین نیز جسم اول Link_4، جسم دوم ground و موقعیت اتصال نقطه O۴ باید تعریف شود.
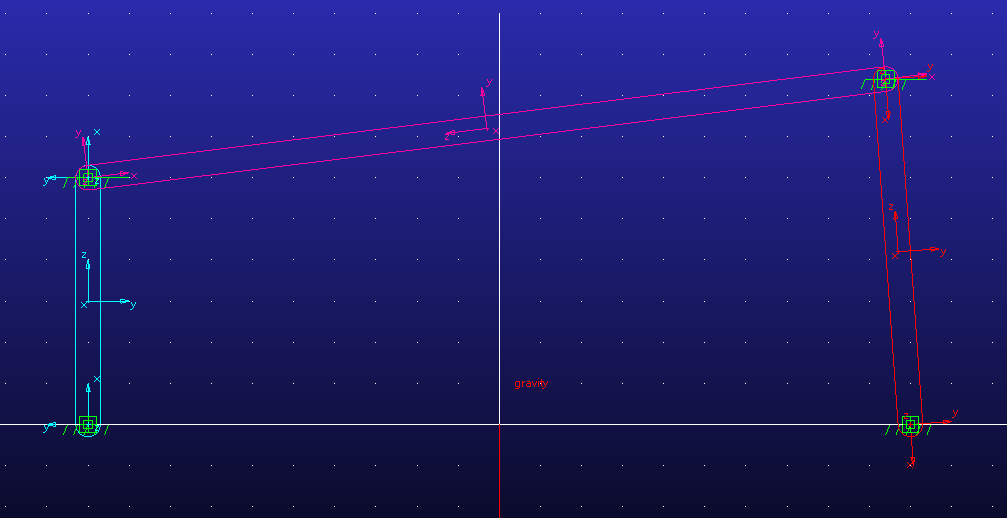
نهایتا شکل نهایی مکانیزم به صورت زیر خواهد بود:
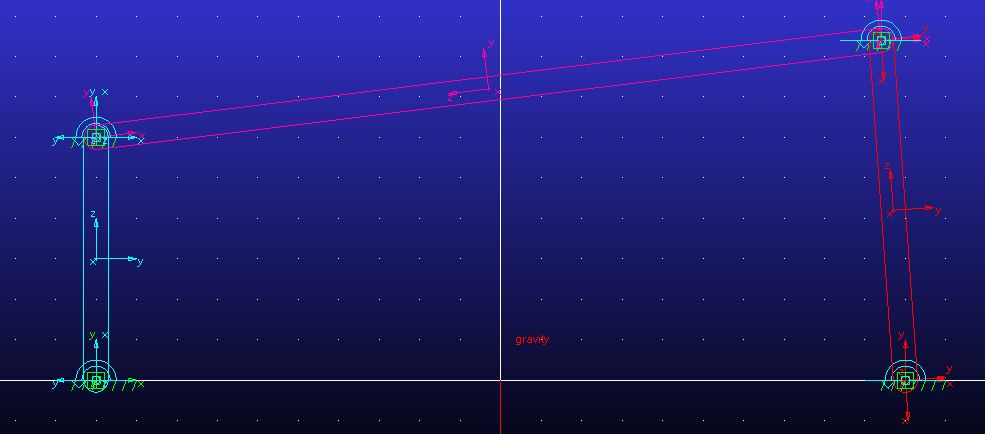
شکل ۱۰ – مدل نهایی مکانیزم چهار لینکی در محیط view نرمافزار Adams جمع بندی
در این مطلب در رابطه با نحوه مدلسازی مکانیزم چهارلینکی در نرمافزار Adams بحث شد. بر اساس روابط بخش اول آموزش، یک مکانیزم چرخشی- نوسانی طراحی و توضیح نحوه تعریف اتصالات چرخشی بین لینکهای آن نیز ارائه شد. در مطالب بعدی در رابطه با نحوه سرعت دهی و حرکت این مکانیزم صحبت میکنیم.
ادامه آموزش: تحلیل سرعت و حرکت مکانیزم چهار لینکی
چنانچه سوالی در رابطه با این آموزش دارید، میتوانید در بخش “نمایش دیدگاهها / انتشار دیدگاه” مطرح کنید تا در کنار یکدیگر به آنها پاسخ دهیم.
برای بهتر شده آموزشها پذیرای نظرات، پیشنهادات و انتقادات ارزشمند شما هستم.
باتشکر از همراهی شما
دانلود و فعالسازی نرمافزار MSC Adams 2020
ویدئوی آموزش نصب و فعالسازی MSC Adams 2020
تحلیل سرعت چرخدنده در Adams
نرمافزار MSC Adams قابلیتهای مختلفی برای ایجاد و تحلیل مجموعههای چرخدنده دارد. در مطالب گذشته در مورد روابط بین چرخدندههای ساده در یک زجیره و همچنین نحوه مدلسازی چرخدندههای ساده در نرمافزار آدامز بحث شد. در این مطلب در رابطه با چگونگی تعریف سرعت چرخدنده در Adams بحث خواهد شد. همچنین نحوه تحلیل سرعت خروجی سایر چرخدندههای درگیر در مجموعه نیز توضیحاتی ارائه میشود.
زنجیره چرخدنده ساده
برای تحلیل سرعت در این مطلب، از مدل مطلب” مدلسازی چرخدنده در Adams” استفاده خواهد شد. پیشنهاد میکنم اگر هنوز آموزش مربوطه را مشاهده نکردید یا در رابطه با تئوری نحوه مدلسازی چرخدنده ساده سوالی دارید، ابتدا ” تئوری چرخدنده در نرمافزار Adams” را مطالعه فرمایید.
بعد از اینکه مدلسازی چرخدنده در محیط کاری نرمافزار آدامز انجام گرفت باید سرعت دورانی مشخصی برای چرخدنده ورودی ( Gear_1 ) تنظیم شود تا مجموعه به حرکت درآید.
در ادامه آموزش مربوطه ارائه شده است:
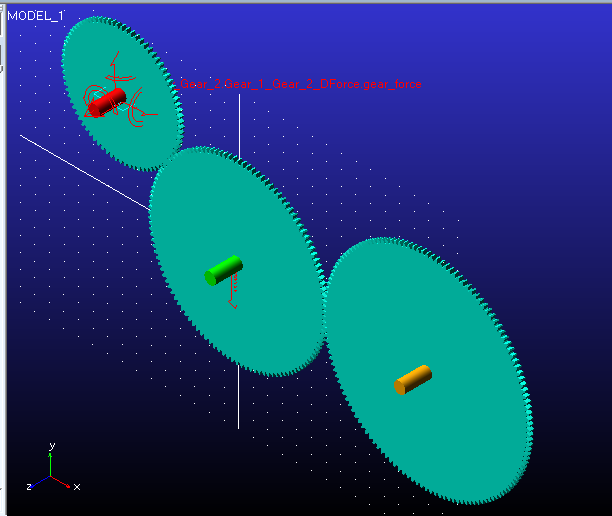
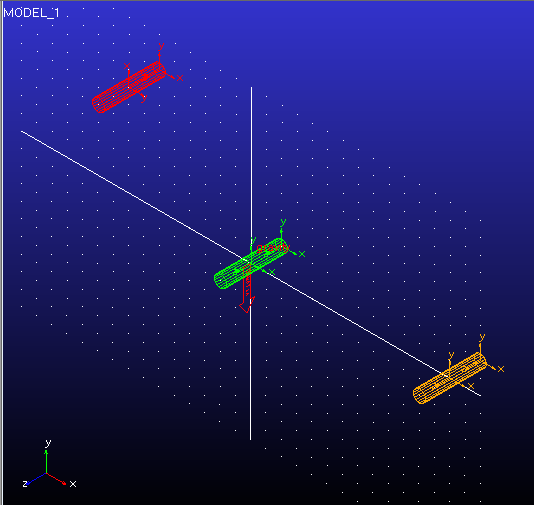
شکل ۱- زنجیره چرخدنده ساده طراحی شده در آموزشهای قبلی تعریف سرعت چرخدنده ورودی در Adams
به کمک امکانات بخش Motions نرم افزار Adams/view، سرعت ورودی برای چرخدنده اول (Gear_1) تعریف میشود. با رفتن به زبانه Motions از بخش Joint Motions بر روی آیکون مربوط به حرکت دورانی (Rotational Joint Motion) کلیک کنید. مقدار سرعت دورانی (Rot. Speed) را برابر ۳۵ قرار دهید سپس نشانگر موس را بر روی Shaft_1 برده و بعد از نمایش نام Joint_1 در کنار نشانگر بر روی آن کلیک کنید تا Joint_1 دارای سرعت دورانی ۳۵ deg/s تعیین شود.
شبیهسازی حرکت چرخدنده در Adams
رابطه کلی نسبت سرعت (VR) در یک زنجیره چرخ دنده که در “تئوری چرخدندهها” معرفی شد در این بخش مورد بررسی قرار خواهد گرفت. این بررسی بر اساس نسبت \frac{_DN}{_FN} = \frac{_DD}{_FD} = \frac{_F\omega}{_D\omega} که از رابطه مذکور بدست آمده است خواهد بود. طبق این رابطه با مشخص بودن نسبت قطر گام چرخدنده متحرک به چرخدنده محرک یا نسبت تعداد داندانه چرخ دنده متحرک به چرخ دنده محرک و دانستن سرعت ورودی در چرخدنده اول، سرعت خروجی زنجیره را بدست آورد.
بررسی این نسبتها نیاز به داشتن سرعت خروجی در نتیجه شبیهسازی است تا آن را با نسبت بین تعداد دندانه ها یا قطر گام چرخدنده ها مقایسه کرد.
برای شروع شبیهسازی پنجره Simulation Control را باز کنید و مقادیر End Time و Steps را به ترتیب برابر ۱۰ و ۵۰۰ قرار دهید. سپس بر روی دکمه Run کلیک کنید تا شبیه سازی به طور کامل انجام شود، بعد از اتمام شبیهسازی، بر روی Reset کلیک کنید تا به حالت اولیه بازگردید. پنجره شبیه سازی را باز نگه داشته و در قسمت پایین آن بر روی دکمه Plotting کلیک کنید تا به طور مستقیم وارد محیط Adams/PostProcessor شوید.
نمودارگیری در Adams PostProcessor
به بخش پایینی تنظیمات Data در محیط PostProcessor رفته و مطابق شکل ۲ منوی Source را بر روی Objects قرار بدهید (۱). سپس گزینه Body را در بخش Filter فعال کنید (۲). به قسمت Object بروید و در زیرمجموعه Gear_1_1 گزینه gear_part را انتخاب کنید (۳). سپس در بخش Characteristic گزینه CM_Angular_Velocity را انتخاب (۴) کنید. درنهایت برای نمایش نمودار سرعت دورانی چرخ دنده اول (Gear_1)، محور Z را به عنوان محور دورانی مورد نظر مشخص (۵) کنید.
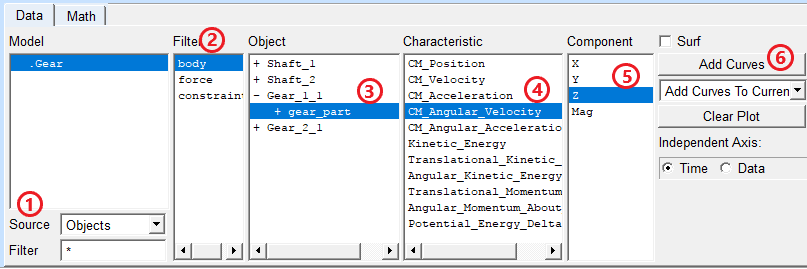
شکل ۲- نحوه ایجاد نمودار سرعت چرخدنده در Adams با انجام تنظیمات بالا، نمودار به صورت یک خط راست با مقدار ثابت ۳۵ درجه بر ثانیه و بر اساس مقداری که قبلا برای سرعت دورانی تعریف کردیم، ایجاد شده است. اینک باید نمایش سرعت دورانی خروجی نیز بر روی نمودار انجام شود، تمامی مراحل شکل ۱۷-۵ را برای چرخ دنده سوم (Gear_3) انجام دهید و در نهایت نیز می توانید سرعت دورانی چرخدنده میانی (Gear_2) را نیز نمایان کنید تا نمودار نهایی مانند شکل ۳ شود.
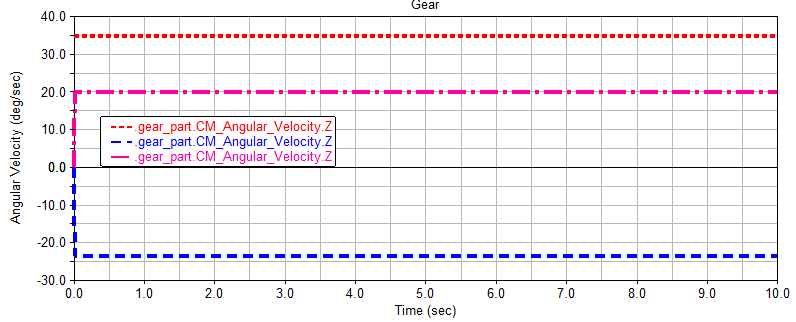
شکل ۳- نمودار سرعت دورانی چرخدنده اول، دوم و سوم نمودار نشان می دهد که سرعت دورانی چرخ دنده اول برابر
35deg/sو سرعت دورانی چرخدنده سوم نیز برابر20deg/sاست.تئوری
حالا به صورت تئوری نیز مقدار سرعت دورانی سوم را با کمک روابط مطلب تئوری چرخدنده در نرمافزار Adams بدست می آوریم:
\begin{aligned} \frac{_F\omega}{_D\omega} = VR \end{aligned}\begin{aligned} \frac{7}{4} = \frac{140}{80} = {\frac{_2N}{_1N}.\frac{_3N}{_2N}} = \frac{35deg/s}{_3\omega} = VR \longrightarrow \frac{_DN}{_fN}(\pm) = \frac{_DD}{_FD} = \frac{_F\omega}{_D\omega} \end{aligned}\begin{aligned} \omega_3 =\frac{35\times4}{7}=20 deg/s \longrightarrow \end{aligned}همانطور که مشاهده شد سرعت خروجی در محاسبات فوق برابر سرعت خروجی در شبیه سازی است که صحت شبیهسازی و روابط را تایید می کند.
به همین ترتیب میتوان برای هر چرخدنده دیگری که در یک سیستم وجود دارد سرعتهای دورانی را مشاهده و نمودارهای تغییرات هر کدام را به راحتی استخراج کرد.
در این آموزش درباره نحوه بررسی سرعت چرخدنده در Adams بحث شد. در آموزشهای آینده در رابطه با انواع دیگر زنجیرههای چرخدنده مثل زنجیره مرکب و خورشیدی نیز بحث خواهد شد.
چنانچه سوالی در رابطه با این آموزش دارید، میتوانید در بخش نظرات مطرح کنید.
مجموعه ما برای بهتر شده آموزشها پذیرای نظرات و انتقادات ارزشمند شما است.
باتشکر از همراهی شما
مدلسازی چرخدنده در Adams
یکی از مهمترین اجزاء مجموعههای مکانیکی چرخدندهها هستند که دارای تنوع و کابردهای بسیار زیادی می باشند. در نرمافزار Adams برای طراحی مکانیزمهای دارای چرخدنده میتوان از افزونه Adams Machinery استفاده کرد. این افزونه با داشتن امکانات و کتابخانهای جامع از چرخدندهها، امکان مدلسازی انواع سیستمهای مبتنی بر چرخدنده را فراهم میسازد.
در این مطلب مباحث لازم برای ایجاد یک سیستم چرخدنده ساده در نرمافزار Adams با کمک افزونه Adams Machinery ارائه خواهد شد. با ما همراه باشید…
پیشنیازها:
مدلسازی سهبعدی در Adams – بخش اول
مدلسازی سهبعدی در Adams – بخش دوم
تئوری چرخدندهها برای مدلسازی آنها در Adams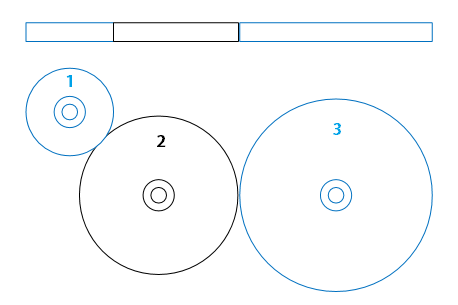
شماتیک زنجیره چرخدنده ساده جهت مدلسازی در Adams ایجاد محور چرخدنده در Adams
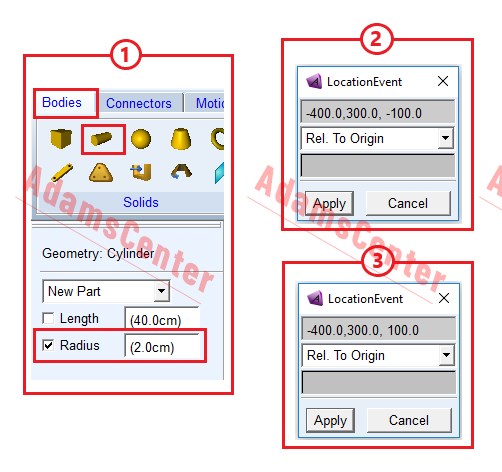
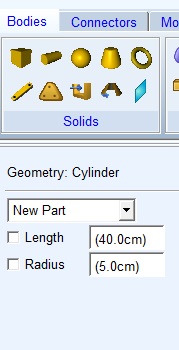
در اولین قدم برای ایجاد یک مجموعه چرخدنده باید شفتهایی که قرار است تا چرخدنده بر روی آنها قرار بگیرند مدلسازی شوند. برای مدلسازی این شفتها، بعد از باز کردن کردن و تعیین نام یک پروژه جدید در نرمافزار، در محیط view به بخش Bodies بروید. از قسمت Solids بر روی Cylinder کلیک کنید. در بخش تنظیمات Geometry، نوع پارت را به صورت پارت جدید (New Part) تعریف کرده، سپس مقدار طول یا Length را آزاد قرار میدهبم. با فعال کردن تیک شعاع یا Radius مقدار ۲.۰cm برای آن تعریف کنید (مطابق بخش ۱ از شکل ۱).
همچنانکه تنظیمات فوق برقرار است، نشانگر موس را به میان صفحه کاری ببرید و راست کلیک کنید تا پنجره انتخاب مختصات با نام LocationEvent در کنار محیط view باز شود. مختصات ابتدای محور را مانند بخش ۲ از شکل ۱ تعریف و بر روی Apply کلیک کنید. برای تعریف مختصات انتهای محور، در محیط کاری دوباره راست کلیک کنید و مختصات انتهایی محور را مانند بخش ۳ از شکل ۱ تعریف و بر روی Apply کلیک کنید. با اینکار اولین محور یا شفت مورد نظر ایجاد میشود.
شکل ۱ – ایجاد محور با کمک پنجره LocationEvent نحوه تغییر نام یک پارت
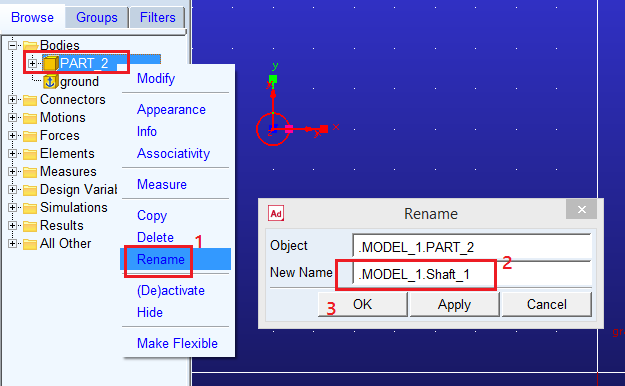
از منوی درختی قسمت جستجوگر (Browse) در منوی کناری محیط نرم افزار بر روی Bodies کلیک کنید تا زیر مجموعه آن باز شود. به صورت پیشفرض محور فوق با نام PART_2 تعریف شده است (در مدلسازیها، نرمافزار همیشه پارت اول را زمین فرض میکند ). مطابق شکل ۲ بر روی نام آن راست کلیک و گزینه Rename را انتخاب کنید (۱)، در پنجره Rename نام محور یا شفت را به Shaft_1 تغییر دهید (۲) و درنهایت بر روی Ok کلیک کنید (۳).
* در این شکل، نام پروژه MODEL_1 تعریف شده است، بنابراین همیشه در ابتدای نام برخی از ویژگیهای مدل قرار میگیرد.
شکل ۲ – نحوه تغییر نام اجزاء در Adams محور دیگری به روش گفته شده اینبار با مختصات (۱۰۰-,۰,۰) ( (x,y,z))برای ابتدای آن و (۱۰۰,۰,۰) برای انتهای آن تعریف کرده و نام آن را به Shaft_2 تغییر دهید. سومین محور را نیز با نام Shaft_3 با مختصات ابتدایی (۱۰۰-,۰,۶۵۰) و مختصات انتهایی (۱۰۰,۰,۶۵۰) ایجاد کنید.
با این مرحله نمای ایزومتریک کار به صورت شکل ۳ خواهد شد:
شکل ۳- شفت یا محورهای تعریف شده برای اتصال به چرخدنده ها اتصال محورها به زمین
اینک باید مقیدسازی شفتها به زمین را انجام داد، برای اینکار می توان هر کدام از محورها را به صورت جدا با اتصال چرخشی یا لولایی (Revolute Joint) به زمین مقید کرد. بر روی زبانه Connectors کلیک کنید تا ابزارهای بخش اتصالات ظاهر شود. پس از آن، ابزار ایجاد اتصال چرخشی یا Create a Revolute joint را انتخاب کرده تا بخش تنظیمات آن ظاهر شود. بدون تغییر تنظیمات اولیه قیدگذاری، نشانگر را به صفحه کاری ببرید و زمین (Ground) را به عنوان پارت اول و Shaft_1 را به عنوان پارت دوم انتخاب کنید، مارکر مرکز جرم محور اول را ( Shaft_1.cm ) نیز به عنوان مختصات اتصال تعیین کنید، بعد از اینکار حالت گرافیکی قید ظاهر میشود که نشاندنده تعریف درست آن است.
شکل ۴- نمای ایزومتریک اتصال شفت به زمین سپس فرآیند فوق را بر روی محورهای دوم (Shaft_2) و سوم (Shaft_3) نیز انجام دهید.
تعریف چرخدنده
تا این مرحله محورها ایجاد شده اند. اینک برای تعریف چرخدندهها در Adams به زبانه Machinery رفته و در قسمت Gear بر روی (Create Gear Pair) کلیک کنید تا پنجره ایجاد چرخدندهها باز شود.
در صفحه Type می توان نوع چرخدنده را انتخاب کرد، نوع Spur را انتخاب و بر روی Next کلیک کنید(شکل ۵).
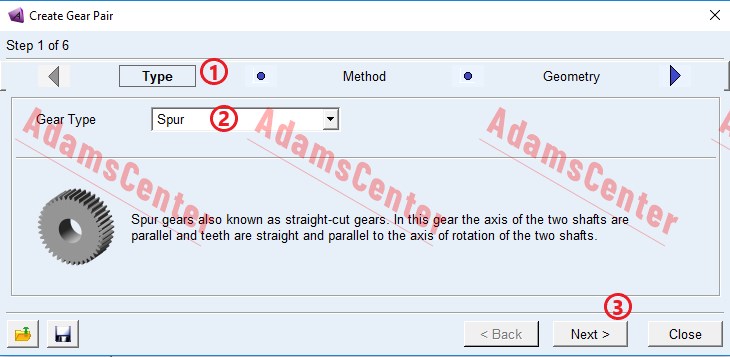
شکل ۵- پنجره تنظیم نوع چرخدنده در Adams تنظیمات صفحه Method، روش تماس دو چرخدنده برای تحلیل آنها را مشخص می کند، منوی Method را بر روی Detailed قرار دهید.
چرا Detailed؟ این ویژگی نیروهای تماس بین جفت چرخ دنده را با استفاده از خصوصیات تماس که توسط کاربر تعریف می شود را تحلیل میکند و می تواند تماس همزمان سه دندانه با یکدیگر را نیز تحلیل کند. همچنین هنگامی که تحلیل های اصطکاکی در شبیه سازی مهم باشد، این نوع روش پیشنهاد می شود.
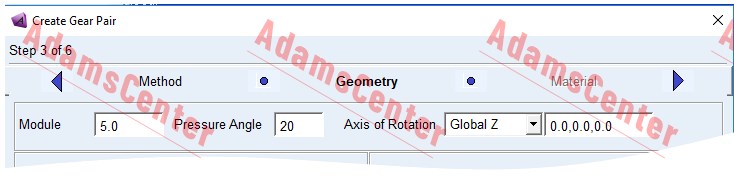
تنظیمات Geometry چرخدنده ساده در Adams
بعد از انتخاب Detailed بر روی دکمه Next کلیک کنید تا وارد صفحه Geometry شوید. در این صفحه باید مشخصات دو چرخ دنده درگیرِ اول را تعریف کنید. مهمترین مشخصهها قبل از تعریف ویژگی چرخ دنده ها، تعیین مقدار مدول، زاویه فشار و تعیین محوری که چرخدندهها حول آن باید دوران داشته باشند است. برای این کار مطابق شکل ۶، مقدار ۵ را برای Module و ۲۰ درجه برای زاویه فشار (Pressure Angel) و محور Global Z را به عنوان محور دوران تعیین کنید.
شکل ۶- تعریف مدول، زاویه فشار و محور دوران چرخدندهها در Adams مطابق شکل ۷، در زیر بخش GEAR1 نام چرخدنده را به Gear_1 تغییر دهید، مختصات (۰,۳۰۰,۴۰۰-) را در بخش Center Location که نشان دهنده مختصات مرکز چرخدنده است وارد کنید. تعداد دندانهها را در بخش No. of Teeth برای چرخدنده اول ۸۰ قرار دهید. عمق چرخدنده (Gear Width) را ۱۵mm تعریف کنید سپس مقدار ۲۰mm را برای حفره چرخ دنده که محور اول (Shaft_1) در آن قرار خواهد گرفت، تعیین کنید. Profile را نیز بر روی Standard قرار دهید و زیرمجموعههای آن را تغییر ندهید، مشخصات چرخ دنده دوم را نیر مطابق شکل تعریف کنید.
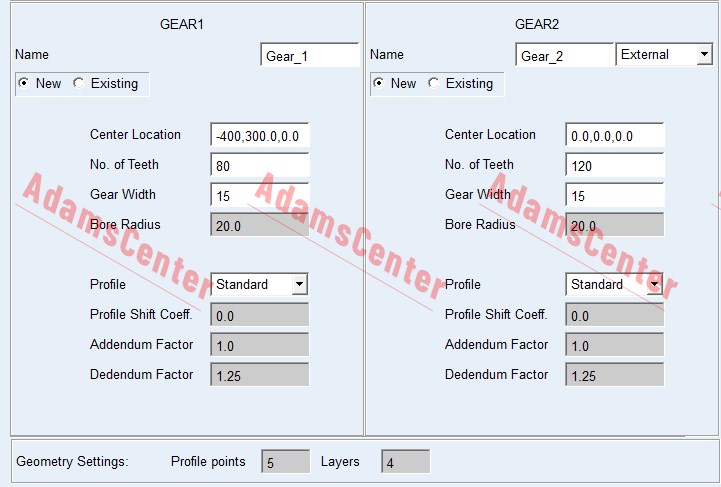
شکل ۷- تنظیمات Geometry چرخدنده در Adams روابط چرخدندهها
نکته مهمی که در زمان تعریف مقادیر صفحه Geometry باید به آن توجه داشت؛ رعایت تناسب بین مقادیر مدول، فاصله بین مراکز چرخدندهها (بر اساس مختصات تعریف شده در بخش Center Location) و تعداد دندانه هر چرخ دنده است. این مقادیر باید متناسب با روابط ارائه شده در تئوری چرخدندهها برای Adams باشند. برای شروع از رابطه زیر استفاده خواهیم کرد:
\begin{aligned} \frac{D}{N} = m \end{aligned}مطابق رابطه فوق مقدار قطرگام برای چرخدنده اول و دوم برابرست با:
\begin{aligned} D_1 = m*N_1 = 5*80 = 400 mm \end{aligned} \\ \begin{aligned} D_2 = m*N_2 = 5*120 = 600 mm \end{aligned}فاصله مرکز تا مرکز دو چرخدنده درگیر نیز باید رابطه زیر را داشته باشد:
\begin{aligned} \frac{_1D_2+D}{2} = C \end{aligned}بنابراین خواهیم داشت:
\begin{aligned} 500mm= \frac{400+600}{2} = \frac{_1D_2+D}{2} \end{aligned}که این مقدار باید برابر با فاصله دو نقطهای که مختصات آنها در بخش Center Location برای هر چرخدنده تعریف شد، باشد. واضح است که فاصله دو نقطه با مختصاتهای (۰,۳۰۰,۴۰۰-) و (۰,۰,۰) در صفحه کاری برابر مقدار ۵۰۰ خواهد بود.
بعد از این که مشخصات Geometry را کامل کردید بر روی Next کلیک کنید تا وارد صفحه Material شوید. همانطور که از نام این صفحه پیداست میتوانید ویژگیهای مربوط به جنس چرخ دنده ها و تماس بین آنها را تعریف کنید.
تنظیمات پیش فرض این صفحه را قبول کنید و بر روی دکمه Next کلیک کنید.
قیدگذاری چرخدندهها
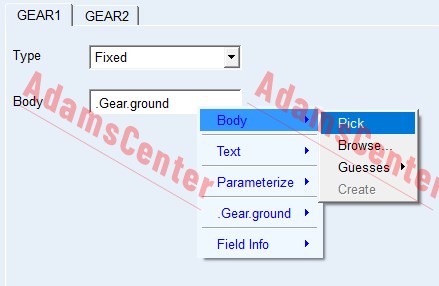
در صفحه Connection باید نحوه مقید بودن چرخدندهها در صفحه کاری محیط Adams/view را مشخص کنید، در این پروژه چرخدندهها باید به شفت ها متصل شوند. برای این کار مطابق شکل ۸، در زبانه GEAR1 منوی Type را بر روی Fixed قرار دهید سپس در کادر جلوی Body راست کلیک کرده و از منوی Body گزینه Pick را انتخاب کنید. نشانگر موس را بر روی Shaft_1 که در مراحل قبل ایجاد شد برده و بر روی آن کلیک کنید تا نام آن در کادر جلوی Body نمایش داده شود (با این کار چرخدنده اول به Shaft_1 فیکس (Fix) میشود). در زبانه GEAR2 نیز Type را بر روی Fixed قرار داده و Shaft_2 را نیز به عنوان جسم منتخب تعیین و بر روی دکمه Next کلیک کنید.
شکل ۸- مقید کردن چرخدنده به محور مدل شده بعد از طی کردن مراحل فوق به صفحه نهایی Completion وارد میشوید. در این بخش، بر روی دکمه Finish کلیک کنید. با اینکار زنجیره تعریف شده، ایجاد میشود. این فرآیند با توجه به قدرت پردازشی سیستم و میزان پیچدگی زنجیره بعد از چند ثانیه یا دقیقه با نمایش چرخدنده ها به اتمام خواهد رسید.
در صورتی انجام دقیق تمامی مراحل بالا، طرح نهایی همانند شکل ۹ خواهد شد.
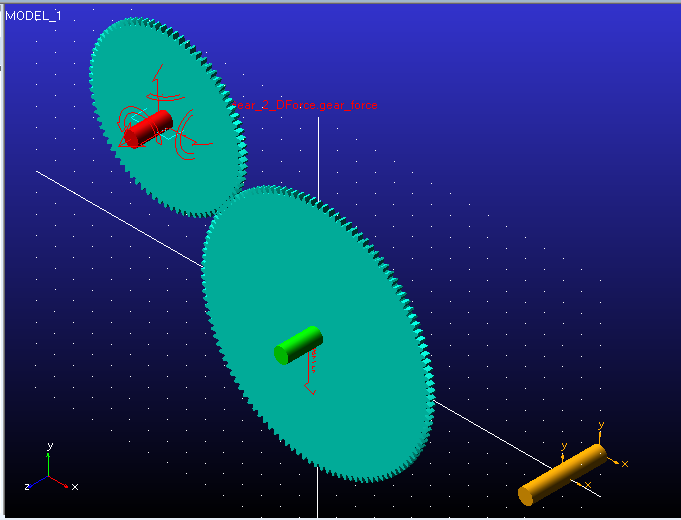
شکل ۹- چرخدندههای مدل شده در Adams نکته: برای نمایش ایزومتریک بر روی آیکون
 کلیک کنید.
کلیک کنید.نکته: برای نمایش حالت تو پر اجسام بر روی آیکون
 در پایین محیط کاری، سمت راست، کلیک کنید.
در پایین محیط کاری، سمت راست، کلیک کنید.تعریف سومین چرخدنده در Adams
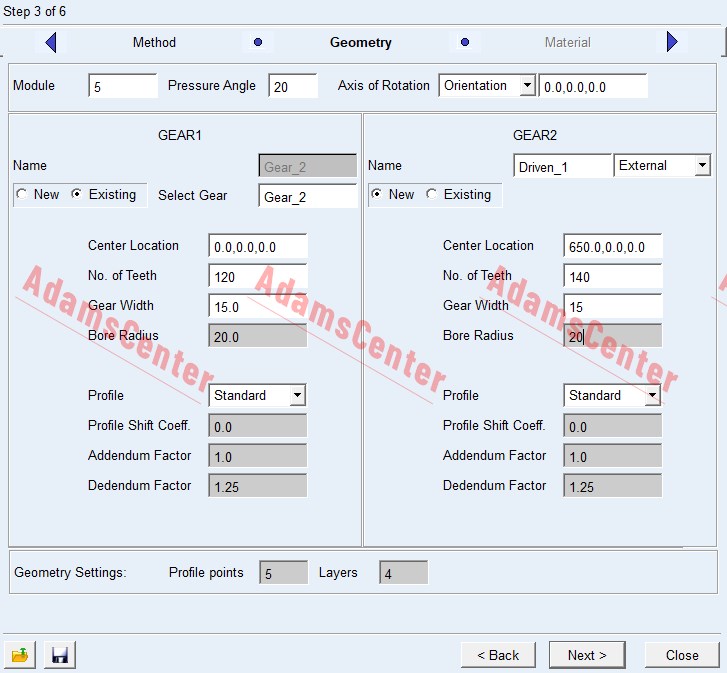
در ادامه لازم است تا یک چرخدنده دیگر برای کامل شدن زنجیره سهتایی مورد نظر در این پروژه، به طرح اضافه شود. برای ایجاد چرخدنده سوم دوباره از بخش Machinery آیکون Create Gear Pair را انتخاب میکنیم. مطابق آموزش مراحل قبل، تا مرحله Geometry پیش بروید، در این مرحله باید مشخصات Gear_2 که در قسمت قبلی ایجاد شد در بخش GEAR1 تعریف کرد (با این تفاوت که باید اینبار گزینه Existing را که در کنار بخش تعریف نام چرخدنده قرار دارد، فعال میکنیم)، سپس در بخش GEAR2 چرخدنده جدیدی با نام Gear_3 تعریف میکنیم.
دوباره مقدار ۵ را برای مدول تعریف و در بخش GEAR1 از کادر پایین عبارت Name، گزینه Existing را انتخاب کنید. با اینکار کادر Select Gear ظاهر میشود. درون کادر دوبار کلیک و در پنجره باز شده Gear_2 را انتخاب و در نهایت تنظیمات بخش GEAR2 را مطابق شکل ۱۰ تعریف کنید.
شکل ۱۰- تنظیم و مدلسازی چرخدنده سوم تا مرحله Connection پیش بروید و چرخدنده سوم را نیز به Shaft_3 لینک کنید. در نهایت نیز مراحل باقیمانده را طی میکنیم تا چرخدنده سوم مانند شکل ۱۱ به طرح اضافه شود.
- توجه: مقادیر تنظیم شده زنجیره را دوباره می توان با کمک معادلات ارائه شده در تئوری چرخدندهها برای Adams مورد بررسی قرار داد.
شکل ۱۱- طرح نهایی زنجیره چرخدنده سهتایی در نرمافزار آدامز جمعبندی
خوب، تا این مرحله ما توانستیم یک مجموعه چرخدنده را در محیط نرمافزار Adams/view مدلسازی کنیم، مرحله بعد تعریف حرکت در این مکانیزم خواهد بود. بنابراین در آموزش بعدی درباره نحوه حرکت و تحلیل چرخدندههای مدل شده، صحبت میشود.
با ما در آموزش تعریف حرکت چرخدندهها در نرمافزار Adams همراه باشید.
چنانچه سوالی در رابطه با این آموزش دارید، میتوانید در بخش نظرات مطرح کنید تا در کنار یکدیگر به آنها پاسخ دهیم.
همچنین پذیرای نظرات، پیشنهادات و انتقادات ارزشمند شما برای بهتر شده آموزشها هستم.
باتشکر از همراهی شما
دانلود و فعالسازی نرمافزار MSC Adams 2020
ویدئوی آموزش نصب و فعالسازی MSC Adams 2020
تئوری چرخدنده در نرمافزار Adams
چرخدندهها یکی از اصلیترین اجزاء ماشینهای مکانیکی هستند که در انواع و شکلهای مختلفی مورداستفاده قرار میگیرند. در نرم افزار Adams نیز قابلیت مدلسازی انواع مختلف زنجیره و سیستمهای مختلف چرخدنده ها با کمک بخش Adams Machinery وجود دارد. برای مدلسازی صحیح چرخدندهها آشنایی با اصول تئوری لازم جهت مدلسازی آنها در نرمافزار آدامز، از اهمیت ویژه ای برخوردار است. بنابراین در این مطلب در رابطه با مباحث اولیه تئوری چرخدندهها پرداخته خواهد شد تا در آموزشهای بعدی نرمافزار آدامز مورد استفاده قرار بگیرند.
انواع چرخدندهها
انواع مختلفی از چرخدندهها وجود دارد که پرکاربردترین آنها عبارتاند از:
- چرخدندههای ساده یا Spur Gears: این چرخدندهها سادهترین نوع چرخدنده میباشند. از آنها برای انتقال حرکت بین محورهای موازی استفاده میشود. در این چرخدندهها امتداد دندانهها بهموازات محورهاست. در شکل ۱ دو مدل استفاده از این چرخدنده ارائه شده است.
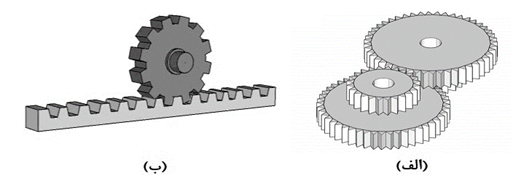
شکل ۱ – چرخدندههای ساده: (الف) Pinion and Wheel، (ب) Rack and Pinion - چرخدنده مارپیچ یا Helical Gear: این چرخدنده مشابه چرخدنده ساده میباشد با این تفاوت که دندانهها بهجای اینکه مستقیم باشند مورب یا منحنی الشکل میباشند این نوع چرخدندهها حرکت را یکنواختتر میکند چراکه هر دندانه بار مربوط به خود را بهطور تدریجی تحمل میکند.

شکل ۲ – چرخدنده مارپیچ - چرخدنده مخروطی یا Bevel Gear: شکل این نوع چرخدندهها مارپیچ است. از چرخدندههای مخروطی برای انتقال توان و حرکت بین شفتهای متقاطع (یا محورهایی که به صورت موازی با یکدیگر نباشند) استفاده میشود.

شکل ۳ – چرخدنده مخروطی - چرخدنده حلزونی یا Worm Gear: این نوع چرخدندههای برای انتقال حرکت بین محورهایی که نسبت به یکدیگر بهصورت عمود و متنافر هستند مورداستفاده قرار میگیرند. این نوع چرخدندهها امکان ایجاد نسبت تبدیلهای زیاد را ایجاد میکنند. در این نوع چرخدندهها پینیون، پیچ حلزون و چرخ حلزون، چرخدنده درگیر با پینیون میباشد.
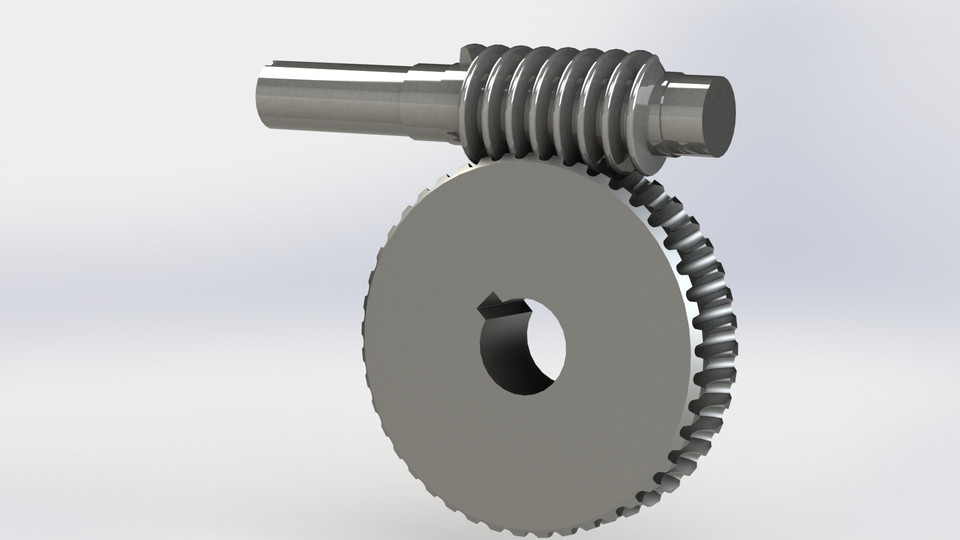
شکل ۴- چرخدنده حلزونی زنجیرههای چرخدنده و روابط آن
مجموعهای از چرخدندهها که برای انتقال حرکت استفاده میشوند یک زنجیره چرخدنده را تشکیل می دهند. معمولا زنجیره چرخدنده برای کاهش یا افزایش سرعت به کار میرود. زنجیرههای چرخدنده به سه دسته کلی تقسیم می شوند:
۱- زنجیره چرخدنده ساده ( Simple Train): در این زنجیره ها بر روی هر محور فقط یک چرخ دنده قرار دارد.
۲- زنجیره چرخ دندهها مرکب ( Compound Train): در این زنجیره ها هر محور، به جز اولین و آخرین محور، محور دو چرخدنده است که با یکدیگر روی آن نصب شدهاند.
۳- زنجیره خورشیدی یا منظومه ای ( Epicycle or Planetary Gear Train): در این زنجیره ها بر خلاف زنجیره های ساده و مرکب که حول محورهای ثابت دوران می کنند محورهای بعضی از چرخدندههای زنجیره جابهجا می شود و از طرف دیگر یک یا دو چرخدنده در این زنجیره ها ثابت هستند.
سرعت در چرخدندهها
یکی از دلایل بسیار مهم که از چرخدنده ها در ماشین ها استفاده می شود، ایجاد نسبت سرعتهای دورانی متفاوت از یک محور به محور دیگر است، نسبت سرعت (Velocity Ratio, VR) در یک زنجیره چرخدنده ساده، به صورت نسبت سرعت دورانی اولین چرخ دنده (ورودی) در زنجیره به سرعت دورانی آخرین چرخ دنده تعریف می شود. هنگامیکه دو چرخ دنده با یکدیگر درگیر می باشند نسبت سرعت خروجی به سرعت ورودی را نسبت سرعت آن دو گویند که بر اساس فرض غلتش خالص به صورت زیر محاسبه میشود:
\begin{aligned} \frac{_DD}{_F D} (\pm)= \frac{_DN}{_FN} = \frac{_F\omega}{_D\omega} = VR \end{aligned}که در رابطه بالا، _F\omega، سرعت چرخدنده خروجی
_D\omega، سرعت چرخدنده ورودی
و _D D و _F D، نیز به ترتیب قطر گام چرخدندههای ورودی (محرک) و خروجی (متحرک) هستند.
فاصله مراکز دو چرخدنده ساده از یکدیگر
هنگام طراحی یک زنجیره چرخ دنده علاوه بر بررسیهای مربوط به نوع چرخدنده، جنس، فرآیند ساخت و به طور کلی طراحی جزئی چرخ دنده ها، قطر گام، مدول و تعداد دندانههای هر چرخدنده به همراه فاصله بین محورهای چرخدندهها در پیاده سازی مکانیزم زنجیره چرخ دنده، از موارد مورد توجه هستند. رابطه بین پارامترهای ذکر شده عبارتند از:
\frac{D}{N} = m\begin{aligned} \frac{_FD_D+D}{2} = C \end{aligned}در روابط فوق:
D ؛ قطر گام چرخدنده
C؛ فاصله مرکز تا مرکز دو چرخدنده درگیر
N؛ تعداد دندانههای چرخدنده و m، مدول دو چرخدنده است.
نکته: مطابق توضیحات، تمامی روابط فوق به طور مستقیم برای زنجیره ساده و با اندکی تغییر برای زنجیره مرکب نیز مورد استفاده قرار خواهند گرفت.
نسبت سرعت در زنجیره
نسبت سرعت ورودی به سرعت خروجی را در زنجیره چرخ دنده ها (ساده و مرکب) مقدار زنجیره (Train Value, TV) نیز می گویند که از نسبت سرعتهای دورانی چرخ دنده های متحرک به سرعت های دورانی چرخ دنده های محرک بدست می آید. اگر در یک زنجیره مرکب، همه چرخ دنده های آن خارجی باشند می توان از فرمول زیر برای محاسبه TV استفاده کرد:
\begin{aligned} \frac{_{Driven}\Pi N}{_{Driver}\Pi N} ^{k-1}(1-)= \frac{_F\omega}{_D\omega} = TV \end{aligned}که در معادله بالا k تعداد محورها است.
در زنجیرههای چرخدنده خورشیدی محورهای بعضی از چرخدندهها ثابت نیست و معمولا با یک یاتاقان به بازو متصل میشوند و با حرکت بازو حرکت میکنند.
برای تحقیق و درک روابط بین پارامترهای مختلف فرمولهای فوق، طراحی و شبیه سازی مکانیزم زنجیره چرخ دندههای ساده، مرکب و خورشیدی در مطالب بعدی آموزش داده خواهد شد و روابط نسبت سرعت ارائه شده برای هر زنجیره به طور کامل و همزمان در نرمافزار Adams مورد بررسی قرار خواهند گرفت.
جمعبندی
در این آموزش روابط اولیه بین چرخدندههای درگیر ارائه شد تا آشنایی اولیه با آنها پیدا کنیم. از این فرمولها و مباحث مربوط به تئوری چرخدندهها در Adams، میتوان برای تنظیمات ایجاد چرخدنده در ماژول Adams Machinery استفاده کرد.
اگر هرگونه سوالی در رابطه با مباحث ارائه شده در این مطلب دارید میتوانید در بخش دیدگاهها مطرح فرمایید.
دانلود و فعالسازی نرمافزار MSC Adams 2020
باتشکر از همراهی شما
مدلسازی سهبعدی در Adams – بخش دوم
نرمافزار تحلیلی Adams علاوه بر بهرهمندی از ابزارهای تخصصی برای تحلیل مکانیزمهای مکانیکی، ابزارهایی نیز جهت مدلسازی قطعات و همچنین تغییر در ساختار هندسی آنها را دارد. بخش کوچکی از این ابزارها در “ آموزش مدلسازی در Adams – بخش اول” معرفی شدند، که مربوط به ابزارهای ایجاد اجسام صلب یا Solids بودند. در این مطلب، سایر ابزارهای بخش Bodies برای مدلسازی سهبعدی در آدامز، معرفی خواهند شد.
آموزشهای مرتبط:
مدلسازی سهبعدی در Adams – بخش اول
آشنایی با محیط view نرمافزارآموزش مدلسازی سهبعدی در نرمافزار Adams

ابزارهای زبانه Bodies در نرمافزار Adams/view دومین پارت از ابزارهای بخش زبانه Bodies مربوط به ساختارهای Flexible Bodies یا اجسام غیر صلب است، با کمک مجموعه امکانات این بخش میتوان اجسام غیر صلب، چند تکه و انعطافپذیر را ایجاد کرد.

ابزارهای ایجاد ساختارهای انعطافپذیر اجسام انعطافپذیر ( غیر صلب) در مدلسازی سهبعدی
مجموعاً ۷ ابزار مختلف در این بخش ارائه شده است؛
- اولین ابزار ( ابزار Adams Flex: Create a Flexible Body) مربوط به فراخوانی مدلهای غیرصلب از پیش آماده میباشد. مدلهایی که در نرمافزارهای اجزاء محدود گرفته شدهاند و سازگار با Adams/Flex هستند.
- ابزار دیگر، Rigid to Flex است که با کمک ان میتوان یک جسم صلب را به یک جسم انعطاف پذیر تبدیل کرد.
- ابزار Flex to Flex، امکان تغییر یک جسم انعطافپذیر به جسم انعطاف پذیر دیگر با ویژگیهای جدید در المان بندی را فراهم میکند، تا طرح مناسبی با توجه به فرضیات مسئله موردنظر، برای تحلیل ایجاد شود.
- با کمک ابزار MNF XForm میتوان یک جسم غیر صلب و انعطاف پذیر را حول یک محور، حرکت، دوران و کپی کرد.
- ابزار Discrete Flex Link برای ایجاد یک تیر (یا بازو – میله – لینک) انعطافپذیر سگمنت بندی، ارائه شده است. که میتوان با توجه به شرایط مسئله موردنظر لینکهایی با ابعاد، طول و تعداد سگمنت دلخواه ایجاد کرد.
- ابزار ViewFlex: Create Flex… امکان ایجاد یک جسم انعطاف پذیر جدید را در محیط view فراهم میکند.
- نهایتاً ابزار Create FE Part در این بخش، همانگونه از نام آن پیداست، برای ایجاد جسم المان بندی شده (مش گذاری شده) ارائه شده است که محدود به اشکال Beam است.
رسم منحنیها، خطوط و تعریف نقاط و مارکرها
در ادامه ابزارهای تب Bodies که برای مدلسازی سهبعدی در نرمافزار آدامز استفاده میشوند، بخش construction قرار دارد. با ابزارهای این بخش میتوان موقعیتها ( Marker)، نقاط ( Point)، خطوط و منحنیهایی ایجاد کرد، که از این منحنی و نقاط میتوان برای ایجاد موقعیت دهی دقیق اجسام در هنگام ایجاد، استفاده کرد و یا اینکه آنها را بهعنوان مراجعی برای تحلیلهای موردنظر در شبیهسازیها قرار داد.

ابزارهای ایجاد منحنی، خطوط و نقاط با کمک ابزارهای این بخش میتوان نقاط یا مارکرهایی ایجاد کرد که در یک نقطه از فضای محیط کاری ثابت باشند و یا اینکه وابسته به موقعیت هم جسم خاصی باشند و با حرکت جسم، آنها نیز تغییر موقعیت دهند. با کمک ابزارهای رسم خطوط و منحنیها، میتوان مسیرهایی برای حرکت محدود اجسام در مکانیزمهای مختلف تعریف کرد.
نهایتاً نیز ابزار Construction Geometry: Point Mass امکان ایجاد نقاط متمرکز جرمی را فراهم میکند. همانگونه که در تحلیل مسائل مختلف دینامیکی، گاهی نیاز است جرم اجسام بهصورت یک نقطه در موقعیت خاصی به طور متمرکز فرض شود. لازم به ذکر است که این نقاط ویژگیهای مربوط به اینرسی و سرعتهای دورانی را نخواهند داشت.
ادغام و وابستهسازی مدلها
ابزارهای Booleans در بخش بعدی از منوی Bodies ارائه شدهاند، با کمک این بخش میتوان وابستگی اجسام و اجزاء محیط کاری به یکدیگر را تعریف کرد.

ابزارهای ادغام و وابسته سازی هندسهها همانطور که از شکل آیکون هر ابزار مشخص است میتوان از آنها باری تغییرات مشخصی در هندسه و ساختار اجسام بهره برد. که در ادامه، هر یک به طور مختصر توضیح داده میشود:
- ابزار Unite to Solid، میتواند دو جسم مختلف و مجزا که در محیط کاری را به یک قطعه یکدست و همگن تبدیل کند. با این تبدیل خواص فیزیکی آنها یکی شده و موقعیت مرکز جرم نیز بر اساس هندسه جدید بهطور خودکار مشخص میشود.
- ابزار Cut out، برای حذف یک قطعه و قسمت همپوشانی شده آن با قطعه دیگر ارائه شده است.
- ابزار Merge two bodies نیز تقریباً مشابه حالت unite to solid است، با این تفاوت که دو جسم میتوانند وابستگی هندسی با یکدیگر نداشته باشند و در موقعیتهای مختلف، دور از یکدیگر و بدون تماس باهم باشند.
- چهارمین ابزار که با نام Split مشخص میشود، این امکان را به ما میدهد تا اجسام جدیدی که به کمک ابزارهای بخش Boolean ایجاد شدهاند را به حالت قبلی برگرداند.
- ابزار Intersect، بخش مشترک بین دو جسم فرورفته در یکدیگر را حفظ کرده و مابقی بخشهای آنها را حذف میکند.
- نهایتاً با کمک ابزار Chain نیز میتوان خطوط هندسی و رسمهای دوبعدی را به یکدیگر وابسته کرد تا به کمک آنها بتوان هندسههای پیچیدهتر ایجاد کرد.
آخرین بخش از ابزارهای زبانه Bodies مربوط به امکانات ایجاد تغییرات و برش ها در حین مدلسازی سهبعدی ایجادشده در محیط view نرمافزار آدامز میباشد. این بخش با نام features مشخص شده است که مشابه ابزارهای تغییر در مدل، نرمافزارهای دیگر حوزه CAD است. ویژگی ابزارهای این بخش در خلال سایر آموزشها توضیح داده خواهد شد.
جمعبندی:
در این مطلب در رابطه با ابزارهای مدلسازی و تغییر سهبعدی و دوبعدی در نرمافزار Adams بحث شد. ابزارهای زبانه Bodies در دو آموزش جداگانه بهصورت مختصر موردبررسی قرار گرفتند.
انشالله در مطالب آینده در رابطه با سایر ابزارهای زبانههای دیگر محیط کاری نرمافزار آدامز آموزشهایی ارائه خواهد شد.
امیدوارم این مطلب نیز برای شما مفید واقع شود و درصورتیکه سؤال، نظر یا پیشنهادی داشتید، میتوانید آن را در بخش نظرات بنویسید تا در کنار یکدیگر آنها را بررسی کنیم.
با تشکر از همراهی شما
آموزش نصب و فعالسازی نرمافزار MSC Adams 2020
مدلسازی سهبعدی در Adams – بخش اول
در مطالب قبلی در رابطه با کاربرد نرمافزار Adams در موضوعات تحلیلی صحبت کردیم. اما در نرم افزار MSC adams هم مانند اکثر نرمافزارهای حوزه تحلیل مکانیکی، امکان مدلسازی سه بعدی اجسام وجود دارد. ابزارهای مدلسازی سهبعدی در Adams در حدی هستند که بتوان برخی از ساختارها و قطعات ( نه چندان پیچیده) را در آنها طراحی کرد. یا اینکه از آنها برای ایجاد تغییرات در مدلهای سهبعدی که پیشتر در نرمافزار جداگانهای ایجاد شده، استفاده کرد. اما در سطح نرم افزارهای تخصصی این حوزه قرار نخواهد گرفت. بنابراین پیشنهاد میشود که براساس میزان پیچدگی و سادگی طرحی که قصد تحلیل آن در نرم افزار Adams را دارید از این امکان نرم افزار بهره ببرید و یا اینکه به سراغ نرمافزار مخصوص حوزه CAD بروید.
با توجه به این توضیحات، در این مطلب در رابطه با ابزارهای مدلسازی سهبعدی در Adams بحث خواهد شد. در مطالب آینده نیز این مبحث کامل تر میشود.
برای کسب اطلاعات بیشتر راجع به نرم افزار تحلیل مهندسی Adams یا دانلود آن میتوانید از لینکهای زیر استفاده کنید:
دانلود نرمافزار MSC Adams 2020
آموزش نصب و فعالسازی MSC Adams 2020آموزش مدلسازی سهبعدی در نرمافزار Adams
در نرم افزار Adams به دو صورت می توان از قطعات سه بعدی برای تحلیل استفاده کنیم. اولین روش استفاده از نرم افزارهای اختصاصی طراحی مهندسی مثل سالیدورک و کتیا است، که می توان خروجی مدل ساخته شده در آنها را در نرم افزار ادامز وارد و مورد تحلیل قرار داد. روش دیگری که برای این کار وجود دارد، استفاده از امکانات موجود در خود نرم افزار Adams برای طراحی مدل ها است، که با کمک ابزارهای بخش Bodies و Connectors در محیط view امکان پذیر است. در این آموزش با امکانات و ابزارهای مدلسازی قطعات سه بعدی در نرم افزار آدامز آشنا خواهیم شد.
اولین بخشی که با کمک آن باید قطعات سهبعدی را ایجاد کرد، بخش Solids در زبانه Bodies است.

شکل ۱ – مکان دسترسی به ابزارهای مدلسازی اولیه با کمک هر یک از آیکونهای این بخش، می توان اشکال هندسی مختلفی را ایجاد کرد.
مدلسازی مکعب
اولین آیکون گزینه ایجاد مکعب یا Box است که با کلیک بر روی آن بخش تنظیمات مربوط به ایجاد اجسام مکعبی باز میشود.
شکل ۲ – تنظیمات ایجاد مکعب مطابق شکل اولین بخش مربوط به تعریف وابستگی نوع قطعه است که در منوی کشویی قابل تنظیم می باشد. این منو دارای ۳ گزینه است: New Part، که برای تعریف یک قطعه جدید استفاده می شود. Add to Part که برای اضافه کردن قطعه جدید به قطعه از پیش ایجاد شده استفاده می شود. همچنین گزینه On Ground که برای مقید کردن قطعه به زمین محیط کاری استفاده می شود.
اما در ادامه تنظیمات ایجاد Box، سه گزینه مربوط به ابعاد قطعه نیز مشخص شده است که با فعال کردن هرکدام می توان ابعاد موردنظر برای ایجاد مکعب را تنظیم کرد. گزینه های Length، Height و Depth هر کدام به ترتیب مربوط به طولف ارتفاع و عمق هستند که براساس زاویه دید از مقابل صفحه کاری می باشند.
مدلسازی استوانه
دومین آیکون در بخش Solids مربوط به ایجاد قطعات استوانه ای یا Cylinder است که می توان با کمک ان هندسه های مختلف استوانه ای شکل را ایجاد کرد.
شکل ۳ – تنظیمات ایجاد استوانه این بخش نیز دارای یک منوی کشویی است که نوع قطعه جدید را تعریف می کند و دو گزینه بعدی که عبارتند از Length و Radius هر کدارم به ترتیب مربوط به اندازه طول و شعاع استوانه خواهند بود.
یکی از کاربردهای مهمی که این هندسه دارد در ایجاد انواع محورها و شفتهای لازم در مکانیزمها است. به خصوص محورهای متصل به چرخدنده ها و سیستمهای انتقال قدرت.
مدلسازی کره و سایر اشکال
سومین ابزار مربوط به ایجاد اجسام کروی می باشد با نام Sphere شناخته می شود. منوی اول در تنظیمات ایجاد این جسم هم مانند دو قسمت قبلی مربوط به نحوه ایجاد آن است و گزینه بعدی نیز مربوط به شعاعی است که می توان به صورت خودکار برای قطعه تنظیم کرد.
بخش های دیگر این دسته از ابزارهای مدلسازی سهبعدی در Adams که با نام Solids شناخته می شوند نیز به همین صورت قابل استفاده هستند. اجسامی مانند مخروط، حلقه، لینک، پارتهای چندضلعی، پارتهای تو خالی و صفحهها.
جمع بندی:
در این مطلب در رابطه با اولین ابزارهای ایجاد مدل های سه بعدی در نرم افزار بحث شد که مربوط به بخش Solids بودند.
در مطالب آینده در رابطه با سایر ابزارهای این بخش آموزشهایی ارائه خواهد شد.
امیدوارم این مطلب نیز برای شما مفید واقع شود و در صورتی که سوال، نظر یا پیشنهادی داشتید، می توانید آن را در بخش نظرات بنویسید.
باتشکر از همراهی شما
معرفی محیط Adams/view
محیط adams/view یکی از سه بخش اصلی هسته مرکزی نرمافزار آدامز محسوب میشود، این بخش شامل مدلسازی سهبعدی، تعریف اجسام و خواص، قیدها و مفصلهای مختلف، نیروها،جابهجاییها و … است. از این رو آشنایی با این محیط و قابلیتهای آن دارای اهمیت است. بنابراین درباره این محیط و برای آشنایی اولیه با آن، در این مطلب توضیحاتی ارائه شده است. همراه ما باشید…
نرمافزار MSC Adams
مجموعه نرمافزاری Adams (محصول شرکت MSC) یکی از قدرتمندترین نرمافزارهای CAE میباشد که در بین نرمافزارهای مهندسی مکانیک موجود در بازار یکی از بیرقیبترین آنها در حوزه شبیهسازی و تحلیل مکانیزمها و ماشینهای مکانیکی است.
محیط Adams view
این بخش امکانات کاملی جهت مدل کردن یک مکانیزم مکانیکی و شبیهسازی آن را به صورت یکپارچه ارائه میدهد. محیط Adams/view دارای مجموعه وسیعی از ابزارهای تعریف قیود و اتصالات و همچنین دارای قابلیت نمایش نیروهای مودال، تنشها و کرنشها به صورت استاتیکی است.
با کمک محیط Adams/View میتوان تحلیل سینماتیکی و دینامیکی ماشینها و مکانیزمها را در حوزه زمان، بهصورت جسم صلب یا انعطافپذیر انجام داد. این محیط به کاربر اجازه میدهد تا سیستمهای مکانیکی را مدلسازی و کارکرد آن را در حوزهی زمانی شبیهسازی کند.
همچنین به کمک این محیط از نرمافزار ADAMS میتوان متغیرهای چندگانهی مدل را برای طراحی، تحلیل و بهینه کرد.
محیط گرافیکی Adams/View با انتشار نسخه ۲۰۱۲ دچار تغییراتی اساسی و کاربرپسندتر شد. در مجموعه آموزشهای ما در سایت AdamsCenter.ir سعی شده است تا از نسخههای جدید این نرمافزار (نسخه ۲۰۱۷ و ۲۰۱۸ و ۲۰۲۰) استفاده شود. بنابراین پیشنهاد میشود برای سهولت در فراگیری آموزشهای سایت، مخاطبان محترم نیز یکی از نسخههای ذکرشده فوق را تهیه کنند.
به صورت تفضیلی و در مطالب جداگانه مطالب مربوط به نصب و راهاندازی آنها ارائه شده است:
- دانلود نرمافزار MSC Adams 2020
- آموزش نصب و فعالسازی نرمافزار MSC Adams 2020
- آموزش فعالسازی نرمافزار Adams – نسخههای ۲۰۱۷، ۲۰۱۸ و ۲۰۲۰
- دانلود نرمافزار MSC Adams v. 2017
بخشهای مختلف محیط view
در شکل ۱ مهمترین بخشهای محیط Adams/view نشان داده شده است:
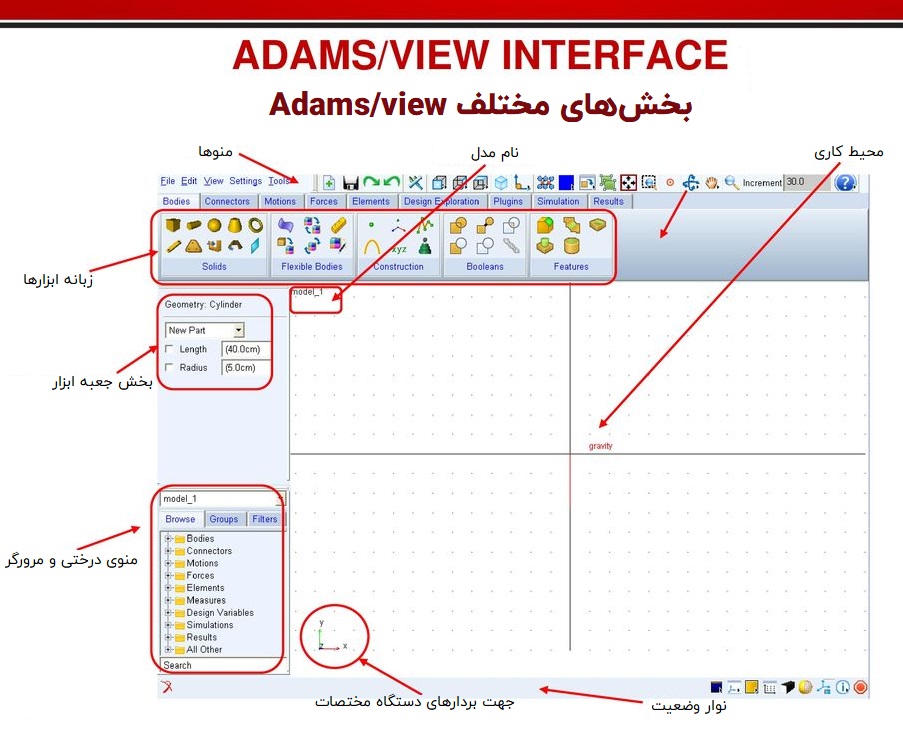
شکل ۱ معرفی بخشهای مختلف محیط Adams/view در قسمت “محیط کاری” یا Working grid مدلمورد نظر قرار خواهد گرفت تا تحلیل بر روی آن انجام شود. در رابطه با این بخش در مطلب ” تنظیمات Working Grid در Adams” بیشتر صحبت شده است.
کاربرد و نحوه کار با بخشهای اشاره شده در شکل ۱، به صورت عملی در آموزشهای سایت ارائه شده است که میتوانبد در حین فراگیری آموزشها، با این بخشها آشنایی بیشتری پیدا کنید.
کلیدهای میانبر در محیط Adams/view
بهتر است که برای سهولت کار در محیط Adams/view برخی از مهمترین کلیدهای میانبر نرمافزار را بدانیم. در ادامه برخی از مهمترین کلیدهای میانبر در نرمافزار Adams و نتیجه هر کدام از آنها ارائه شده است:
F4 : باز شدن پنجره مختصات نشانگر موس
F8 : باز شدن محیط Adams/PostProcessor
Ctrl+S : ذخیرهسازی فایل
Ctrl+N : تعریف فایل جدید
Ctrl+O : بازکردن فایل جدید
Ctrl+Z : باگشت به قبل
Ctrl+R : حرکت دورانی در مدل
Ctrl+T : حرکت انتقالی مدل
Ctrl+W : زوم کردن
Ctrl+Shift+I : نمایش ایزومتریک مدل
Ctrl+Shift+T : نمایش از نمای بالای مدل
Ctrl+Shift+R : نمایش از نمای کناری مدل
Ctrl+Shift+F : نمایش از نمای روبروی مدل
بروزرسانی خرداد ۱۴۰۱
برای مطالعه بیشتر:
دانلود نرمافزار MSC Adams 2020
آموزش نصب و فعالسازی MSC Adams 2020