Your cart is currently empty!
تئوری چرخدنده در نرمافزار Adams

چرخدندهها یکی از اصلیترین اجزاء ماشینهای مکانیکی هستند که در انواع و شکلهای مختلفی مورداستفاده قرار میگیرند. در نرم افزار Adams نیز قابلیت مدلسازی انواع مختلف زنجیره و سیستمهای مختلف چرخدنده ها با کمک بخش Adams Machinery وجود دارد. برای مدلسازی صحیح چرخدندهها آشنایی با اصول تئوری لازم جهت مدلسازی آنها در نرمافزار آدامز، از اهمیت ویژه ای برخوردار است. بنابراین در این مطلب در رابطه با مباحث اولیه تئوری چرخدندهها پرداخته خواهد شد تا در آموزشهای بعدی نرمافزار آدامز مورد استفاده قرار بگیرند.
انواع چرخدندهها
انواع مختلفی از چرخدندهها وجود دارد که پرکاربردترین آنها عبارتاند از:
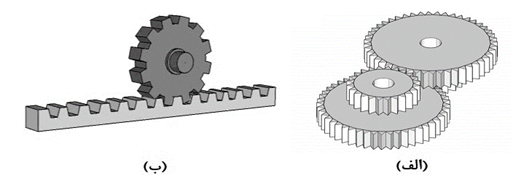
- چرخدندههای ساده یا Spur Gears: این چرخدندهها سادهترین نوع چرخدنده میباشند. از آنها برای انتقال حرکت بین محورهای موازی استفاده میشود. در این چرخدندهها امتداد دندانهها بهموازات محورهاست. در شکل ۱ دو مدل استفاده از این چرخدنده ارائه شده است.
- چرخدنده مارپیچ یا Helical Gear: این چرخدنده مشابه چرخدنده ساده میباشد با این تفاوت که دندانهها بهجای اینکه مستقیم باشند مورب یا منحنی الشکل میباشند این نوع چرخدندهها حرکت را یکنواختتر میکند چراکه هر دندانه بار مربوط به خود را بهطور تدریجی تحمل میکند.

- چرخدنده مخروطی یا Bevel Gear: شکل این نوع چرخدندهها مارپیچ است. از چرخدندههای مخروطی برای انتقال توان و حرکت بین شفتهای متقاطع (یا محورهایی که به صورت موازی با یکدیگر نباشند) استفاده میشود.

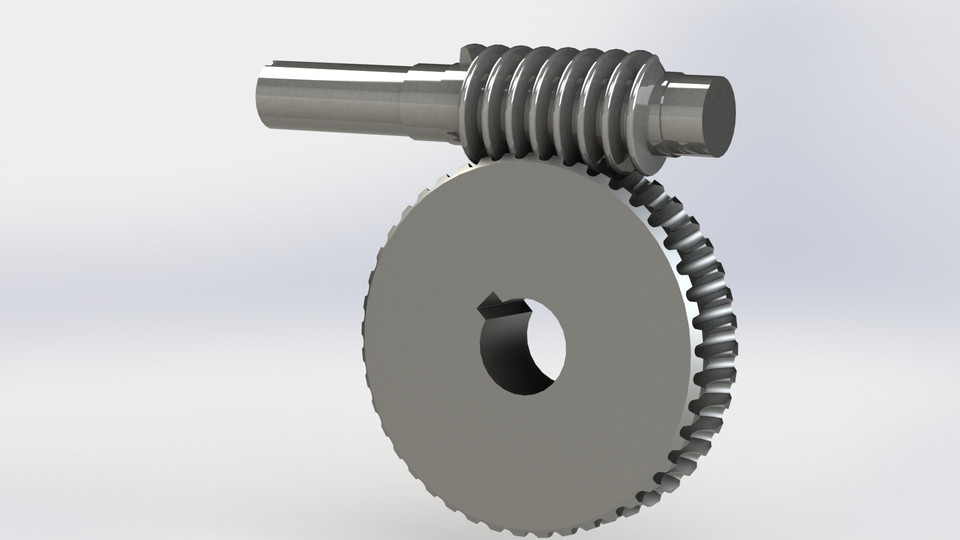
- چرخدنده حلزونی یا Worm Gear: این نوع چرخدندههای برای انتقال حرکت بین محورهایی که نسبت به یکدیگر بهصورت عمود و متنافر هستند مورداستفاده قرار میگیرند. این نوع چرخدندهها امکان ایجاد نسبت تبدیلهای زیاد را ایجاد میکنند. در این نوع چرخدندهها پینیون، پیچ حلزون و چرخ حلزون، چرخدنده درگیر با پینیون میباشد.
زنجیرههای چرخدنده و روابط آن
مجموعهای از چرخدندهها که برای انتقال حرکت استفاده میشوند یک زنجیره چرخدنده را تشکیل می دهند. معمولا زنجیره چرخدنده برای کاهش یا افزایش سرعت به کار میرود. زنجیرههای چرخدنده به سه دسته کلی تقسیم می شوند:
۱- زنجیره چرخدنده ساده ( Simple Train): در این زنجیره ها بر روی هر محور فقط یک چرخ دنده قرار دارد.
۲- زنجیره چرخ دندهها مرکب ( Compound Train): در این زنجیره ها هر محور، به جز اولین و آخرین محور، محور دو چرخدنده است که با یکدیگر روی آن نصب شدهاند.
۳- زنجیره خورشیدی یا منظومه ای ( Epicycle or Planetary Gear Train): در این زنجیره ها بر خلاف زنجیره های ساده و مرکب که حول محورهای ثابت دوران می کنند محورهای بعضی از چرخدندههای زنجیره جابهجا می شود و از طرف دیگر یک یا دو چرخدنده در این زنجیره ها ثابت هستند.
سرعت در چرخدندهها
یکی از دلایل بسیار مهم که از چرخدنده ها در ماشین ها استفاده می شود، ایجاد نسبت سرعتهای دورانی متفاوت از یک محور به محور دیگر است، نسبت سرعت (Velocity Ratio, VR) در یک زنجیره چرخدنده ساده، به صورت نسبت سرعت دورانی اولین چرخ دنده (ورودی) در زنجیره به سرعت دورانی آخرین چرخ دنده تعریف می شود. هنگامیکه دو چرخ دنده با یکدیگر درگیر می باشند نسبت سرعت خروجی به سرعت ورودی را نسبت سرعت آن دو گویند که بر اساس فرض غلتش خالص به صورت زیر محاسبه میشود:
\begin{aligned}
\frac{_DD}{_F D} (\pm)= \frac{_DN}{_FN} = \frac{_F\omega}{_D\omega} = VR
\end{aligned}
که در رابطه بالا، _F\omega، سرعت چرخدنده خروجی
_D\omega، سرعت چرخدنده ورودی
و _D D و _F D، نیز به ترتیب قطر گام چرخدندههای ورودی (محرک) و خروجی (متحرک) هستند.
فاصله مراکز دو چرخدنده ساده از یکدیگر
هنگام طراحی یک زنجیره چرخ دنده علاوه بر بررسیهای مربوط به نوع چرخدنده، جنس، فرآیند ساخت و به طور کلی طراحی جزئی چرخ دنده ها، قطر گام، مدول و تعداد دندانههای هر چرخدنده به همراه فاصله بین محورهای چرخدندهها در پیاده سازی مکانیزم زنجیره چرخ دنده، از موارد مورد توجه هستند. رابطه بین پارامترهای ذکر شده عبارتند از:
\frac{D}{N} = m\begin{aligned}
\frac{_FD_D+D}{2} = C
\end{aligned}در روابط فوق:
D ؛ قطر گام چرخدنده
C؛ فاصله مرکز تا مرکز دو چرخدنده درگیر
N؛ تعداد دندانههای چرخدنده و m، مدول دو چرخدنده است.
نکته: مطابق توضیحات، تمامی روابط فوق به طور مستقیم برای زنجیره ساده و با اندکی تغییر برای زنجیره مرکب نیز مورد استفاده قرار خواهند گرفت.
نسبت سرعت در زنجیره
نسبت سرعت ورودی به سرعت خروجی را در زنجیره چرخ دنده ها (ساده و مرکب) مقدار زنجیره (Train Value, TV) نیز می گویند که از نسبت سرعتهای دورانی چرخ دنده های متحرک به سرعت های دورانی چرخ دنده های محرک بدست می آید. اگر در یک زنجیره مرکب، همه چرخ دنده های آن خارجی باشند می توان از فرمول زیر برای محاسبه TV استفاده کرد:
\begin{aligned}
\frac{_{Driven}\Pi N}{_{Driver}\Pi N} ^{k-1}(1-)= \frac{_F\omega}{_D\omega} = TV
\end{aligned}که در معادله بالا k تعداد محورها است.
در زنجیرههای چرخدنده خورشیدی محورهای بعضی از چرخدندهها ثابت نیست و معمولا با یک یاتاقان به بازو متصل میشوند و با حرکت بازو حرکت میکنند.
برای تحقیق و درک روابط بین پارامترهای مختلف فرمولهای فوق، طراحی و شبیه سازی مکانیزم زنجیره چرخ دندههای ساده، مرکب و خورشیدی در مطالب بعدی آموزش داده خواهد شد و روابط نسبت سرعت ارائه شده برای هر زنجیره به طور کامل و همزمان در نرمافزار Adams مورد بررسی قرار خواهند گرفت.
جمعبندی
در این آموزش روابط اولیه بین چرخدندههای درگیر ارائه شد تا آشنایی اولیه با آنها پیدا کنیم. از این فرمولها و مباحث مربوط به تئوری چرخدندهها در Adams، میتوان برای تنظیمات ایجاد چرخدنده در ماژول Adams Machinery استفاده کرد.
اگر هرگونه سوالی در رابطه با مباحث ارائه شده در این مطلب دارید میتوانید در بخش دیدگاهها مطرح فرمایید.
دانلود و فعالسازی نرمافزار MSC Adams 2020
باتشکر از همراهی شما
دیدگاهتان را بنویسید